 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmark of visual and 3D lidar SLAM systems in simulation environment for vineyards
Paper and Code
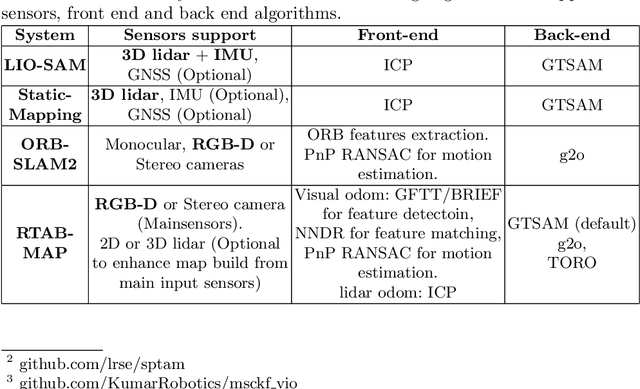
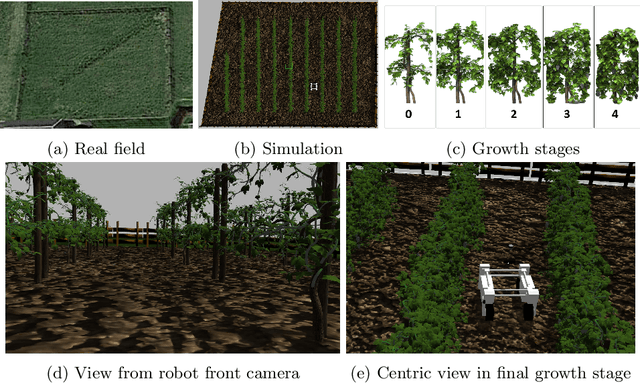
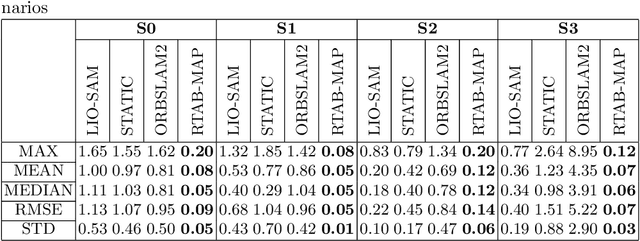
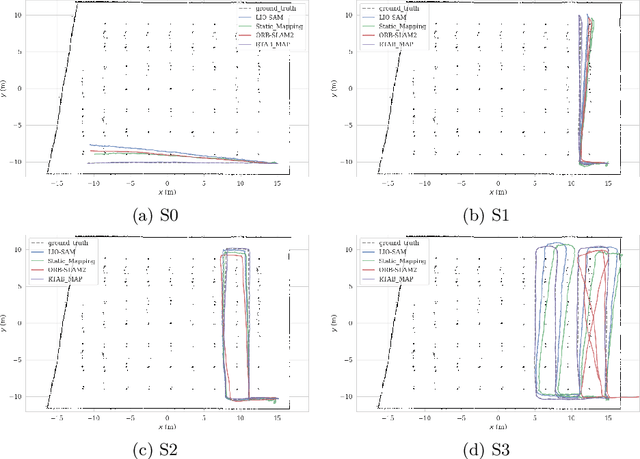
In this work, we present a comparative analysis of the trajectories estimated from various Simultaneous Localization and Mapping (SLAM) systems in a simulation environment for vineyards. Vineyard environment is challenging for SLAM methods, due to visual appearance changes over time, uneven terrain, and repeated visual patterns. For this reason, we created a simulation environment specifically for vineyards to help studying SLAM systems in such a challenging environment. We evaluated the following SLAM systems: LIO-SAM, StaticMapping, ORB-SLAM2, and RTAB-MAP in four different scenarios. The mobile robot used in this study equipped with 2D and 3D lidars, IMU, and RGB-D camera (Kinect v2). The results show good and encouraging performance of RTAB-MAP in such an environment.