 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBEBLID: Boosted efficient binary local image descriptor
Feb 07, 2024Efficient matching of local image features is a fundamental task in many computer vision applications. However, the real-time performance of top matching algorithms is compromised in computationally limited devices, such as mobile phones or drones, due to the simplicity of their hardware and their finite energy supply. In this paper we introduce BEBLID, an efficient learned binary image descriptor. It improves our previous real-valued descriptor, BELID, making it both more efficient for matching and more accurate. To this end we use AdaBoost with an improved weak-learner training scheme that produces better local descriptions. Further, we binarize our descriptor by forcing all weak-learners to have the same weight in the strong learner combination and train it in an unbalanced data set to address the asymmetries arising in matching and retrieval tasks. In our experiments BEBLID achieves an accuracy close to SIFT and better computational efficiency than ORB, the fastest algorithm in the literature.
GlueStick: Robust Image Matching by Sticking Points and Lines Together
Apr 04, 2023Line segments are powerful features complementary to points. They offer structural cues, robust to drastic viewpoint and illumination changes, and can be present even in texture-less areas. However, describing and matching them is more challenging compared to points due to partial occlusions, lack of texture, or repetitiveness. This paper introduces a new matching paradigm, where points, lines, and their descriptors are unified into a single wireframe structure. We propose GlueStick, a deep matching Graph Neural Network (GNN) that takes two wireframes from different images and leverages the connectivity information between nodes to better glue them together. In addition to the increased efficiency brought by the joint matching, we also demonstrate a large boost of performance when leveraging the complementary nature of these two features in a single architecture. We show that our matching strategy outperforms the state-of-the-art approaches independently matching line segments and points for a wide variety of datasets and tasks. The code is available at https://github.com/cvg/GlueStick.
Revisiting Binary Local Image Description for Resource Limited Devices
Aug 18, 2021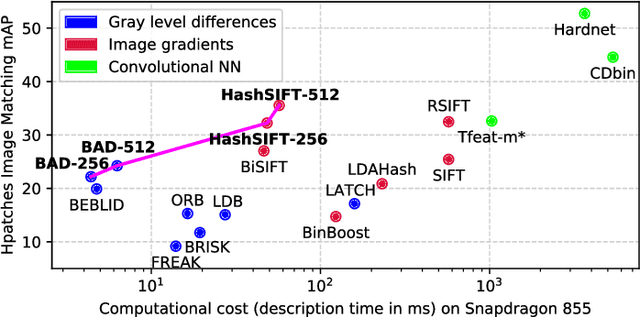

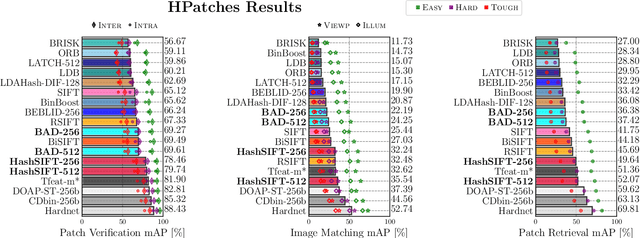
The advent of a panoply of resource limited devices opens up new challenges in the design of computer vision algorithms with a clear compromise between accuracy and computational requirements. In this paper we present new binary image descriptors that emerge from the application of triplet ranking loss, hard negative mining and anchor swapping to traditional features based on pixel differences and image gradients. These descriptors, BAD (Box Average Difference) and HashSIFT, establish new operating points in the state-of-the-art's accuracy vs.\ resources trade-off curve. In our experiments we evaluate the accuracy, execution time and energy consumption of the proposed descriptors. We show that BAD bears the fastest descriptor implementation in the literature while HashSIFT approaches in accuracy that of the top deep learning-based descriptors, being computationally more efficient. We have made the source code public.
ELSED: Enhanced Line SEgment Drawing
Aug 06, 2021
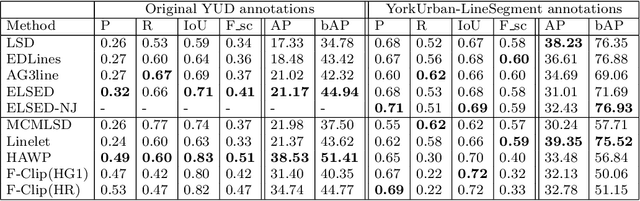
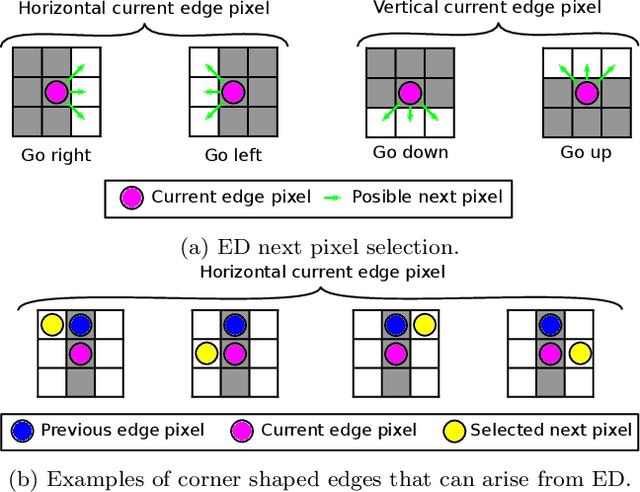

Detecting local features, such as corners, segments or blobs, is the first step in the pipeline of many Computer Vision applications. Its speed is crucial for real time applications. In this paper we present ELSED, the fastest line segment detector in the literature. The key for its efficiency is a local segment growing algorithm that connects gradient aligned pixels in presence of small discontinuities. The proposed algorithm not only runs in devices with very low end hardware, but may also be parametrized to foster the detection of short or longer segments, depending on the task at hand. We also introduce new metrics to evaluate the accuracy and repeatability of segment detectors. In our experiments with different public benchmarks we prove that our method is the most efficient in the literature and quantify the accuracy traded for such gain.