 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Generation Interface of ROS to PODO Software Framework for Wheeled Huamanoid Robot
Jan 02, 2020

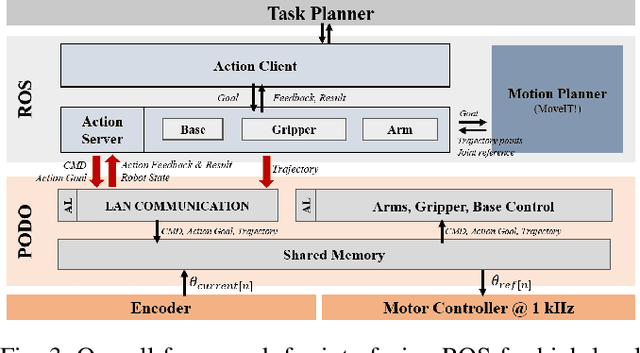
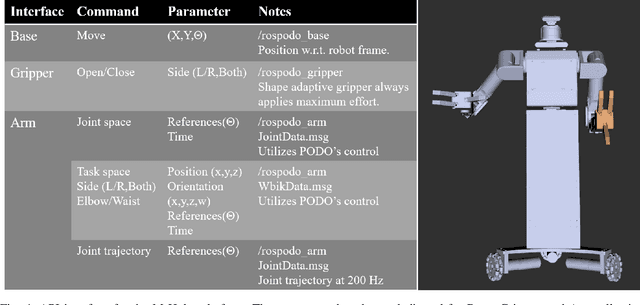
This paper discusses the development of robot motion generation interface between a real-time software architecture and a non-real-time robot operating system. In order for robots to execute intelligent manipulation or navigation, close integration of high-level perception and low-level control is required. However, many available open-source perception modules are developed in ROS, which operates on Linux OS that don't guarantee RT performance. This can lead to non-deterministic responses and stability problems that can adversely affect robot control. As a result, many robotic systems devote RTOS for low-level motion control. Similarly, the humanoid robot platform developed at KAIST, Hubo, utilizes a custom real-time software framework called PODO. Although PODO provides easy interface for motion generation, it lacks interface to high-level frameworks such as ROS. As such, we present a new motion generation interface between ROS and PODO that enables users to generate motion trajectories through standard ROS messages while leveraging a real-time motion controller. With the proposed communication interface, we demonstrate series of manipulator tasks on the actual wheeled humanoid platform, M-Hubo. The overall communication interface responsiveness was at most 27 milliseconds.
Fast Perception, Planning, and Execution for a Robotic Butler: Wheeled Humanoid M-Hubo
Jan 02, 2020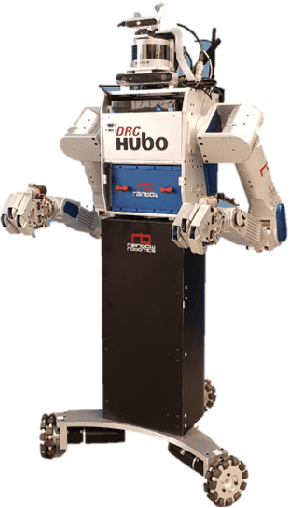
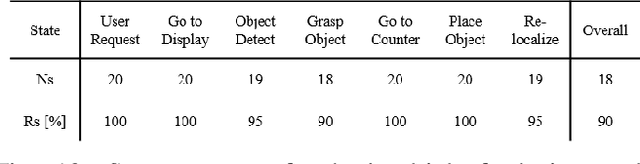
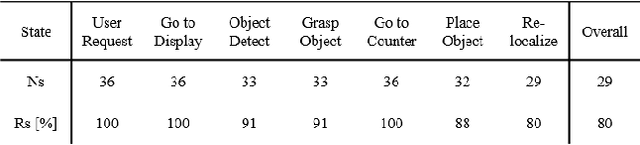
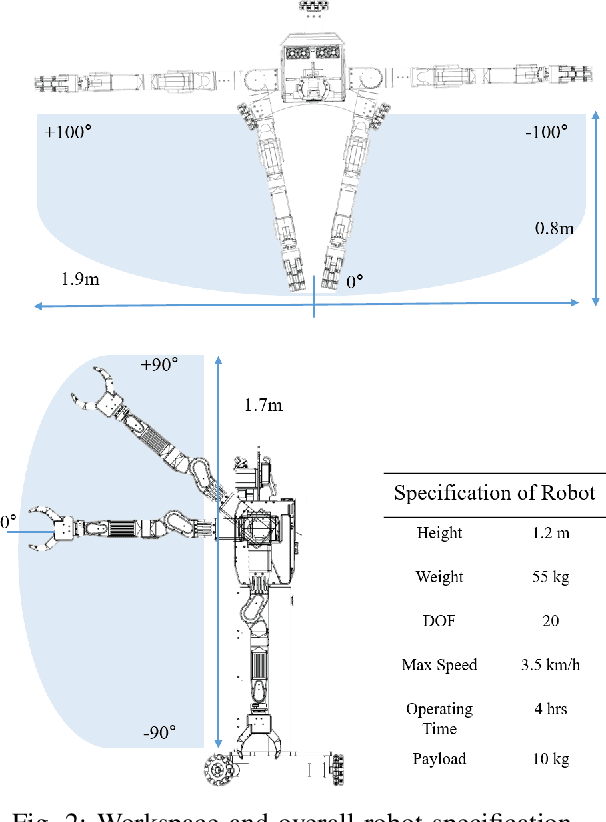
As the aging population grows at a rapid rate, there is an ever growing need for service robot platforms that can provide daily assistance at practical speed with reliable performance. In order to assist with daily tasks such as fetching a beverage, a service robot must be able to perceive its environment and generate corresponding motion trajectories. This becomes a challenging and computationally complex problem when the environment is unknown and thus the path planner must sample numerous trajectories that often are sub-optimal, extending the execution time. To address this issue, we propose a unique strategy of integrating a 3D object detection pipeline with a kinematically optimal manipulation planner to significantly increase speed performance at runtime. In addition, we develop a new robotic butler system for a wheeled humanoid that is capable of fetching requested objects at 24% of the speed a human needs to fulfill the same task. The proposed system was evaluated and demonstrated in a real-world environment setup as well as in public exhibition.