 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatial-wise Dynamic Distillation for MLP-like Efficient Visual Fault Detection of Freight Trains
Dec 10, 2023Despite the successful application of convolutional neural networks (CNNs) in object detection tasks, their efficiency in detecting faults from freight train images remains inadequate for implementation in real-world engineering scenarios. Existing modeling shortcomings of spatial invariance and pooling layers in conventional CNNs often ignore the neglect of crucial global information, resulting in error localization for fault objection tasks of freight trains. To solve these problems, we design a spatial-wise dynamic distillation framework based on multi-layer perceptron (MLP) for visual fault detection of freight trains. We initially present the axial shift strategy, which allows the MLP-like architecture to overcome the challenge of spatial invariance and effectively incorporate both local and global cues. We propose a dynamic distillation method without a pre-training teacher, including a dynamic teacher mechanism that can effectively eliminate the semantic discrepancy with the student model. Such an approach mines more abundant details from lower-level feature appearances and higher-level label semantics as the extra supervision signal, which utilizes efficient instance embedding to model the global spatial and semantic information. In addition, the proposed dynamic teacher can jointly train with students to further enhance the distillation efficiency. Extensive experiments executed on six typical fault datasets reveal that our approach outperforms the current state-of-the-art detectors and achieves the highest accuracy with real-time detection at a lower computational cost. The source code will be available at \url{https://github.com/MVME-HBUT/SDD-FTI-FDet}.
Efficient Visual Fault Detection for Freight Train Braking System via Heterogeneous Self Distillation in the Wild
Jul 03, 2023



Efficient visual fault detection of freight trains is a critical part of ensuring the safe operation of railways under the restricted hardware environment. Although deep learning-based approaches have excelled in object detection, the efficiency of freight train fault detection is still insufficient to apply in real-world engineering. This paper proposes a heterogeneous self-distillation framework to ensure detection accuracy and speed while satisfying low resource requirements. The privileged information in the output feature knowledge can be transferred from the teacher to the student model through distillation to boost performance. We first adopt a lightweight backbone to extract features and generate a new heterogeneous knowledge neck. Such neck models positional information and long-range dependencies among channels through parallel encoding to optimize feature extraction capabilities. Then, we utilize the general distribution to obtain more credible and accurate bounding box estimates. Finally, we employ a novel loss function that makes the network easily concentrate on values near the label to improve learning efficiency. Experiments on four fault datasets reveal that our framework can achieve over 37 frames per second and maintain the highest accuracy in comparison with traditional distillation approaches. Moreover, compared to state-of-the-art methods, our framework demonstrates more competitive performance with lower memory usage and the smallest model size.
Visual Fault Detection of Multi-scale Key Components in Freight Trains
Nov 26, 2022



Fault detection for key components in the braking system of freight trains is critical for ensuring railway transportation safety. Despite the frequently employed methods based on deep learning, these fault detectors are highly reliant on hardware resources and are complex to implement. In addition, no train fault detectors consider the drop in accuracy induced by scale variation of fault parts. This paper proposes a lightweight anchor-free framework to solve the above problems. Specifically, to reduce the amount of computation and model size, we introduce a lightweight backbone and adopt an anchor-free method for localization and regression. To improve detection accuracy for multi-scale parts, we design a feature pyramid network to generate rectangular layers of different sizes to map parts with similar aspect ratios. Experiments on four fault datasets show that our framework achieves 98.44% accuracy while the model size is only 22.5 MB, outperforming state-of-the-art detectors.
A Lightweight NMS-free Framework for Real-time Visual Fault Detection System of Freight Trains
May 25, 2022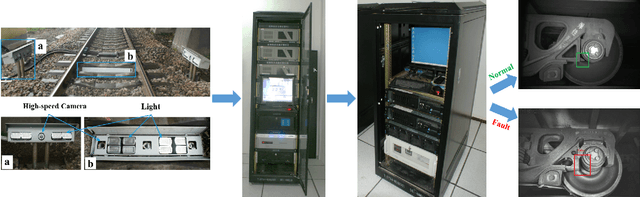
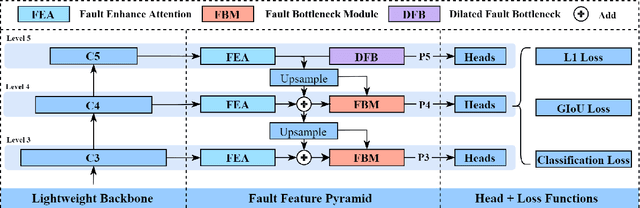
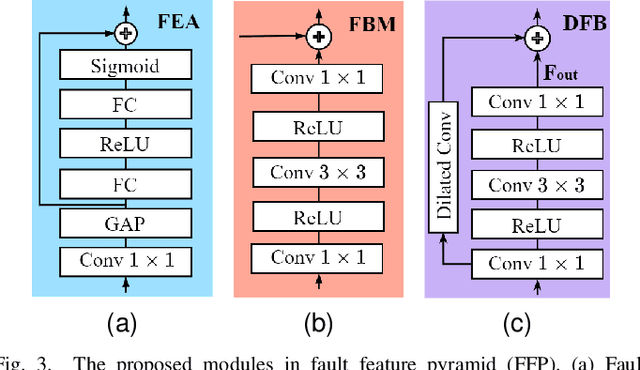
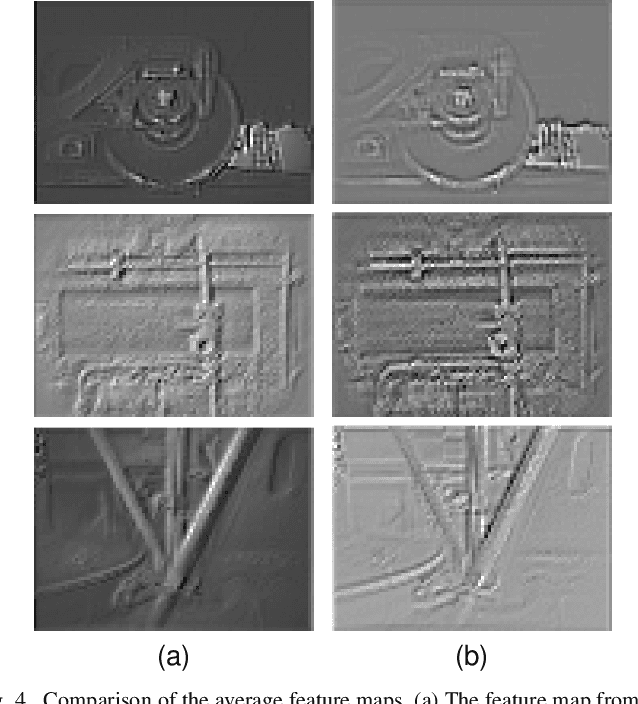
Real-time vision-based system of fault detection (RVBS-FD) for freight trains is an essential part of ensuring railway transportation safety. Most existing vision-based methods still have high computational costs based on convolutional neural networks. The computational cost is mainly reflected in the backbone, neck, and post-processing, i.e., non-maximum suppression (NMS). In this paper, we propose a lightweight NMS-free framework to achieve real-time detection and high accuracy simultaneously. First, we use a lightweight backbone for feature extraction and design a fault detection pyramid to process features. This fault detection pyramid includes three novel individual modules using attention mechanism, bottleneck, and dilated convolution for feature enhancement and computation reduction. Instead of using NMS, we calculate different loss functions, including classification and location costs in the detection head, to further reduce computation. Experimental results show that our framework achieves over 83 frames per second speed with a smaller model size and higher accuracy than the state-of-the-art detectors. Meanwhile, the hardware resource requirements of our method are low during the training and testing process.