 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMATRIX: Multi-Agent Trajectory Generation with Diverse Contexts
Mar 09, 2024



Data-driven methods have great advantages in modeling complicated human behavioral dynamics and dealing with many human-robot interaction applications. However, collecting massive and annotated real-world human datasets has been a laborious task, especially for highly interactive scenarios. On the other hand, algorithmic data generation methods are usually limited by their model capacities, making them unable to offer realistic and diverse data needed by various application users. In this work, we study trajectory-level data generation for multi-human or human-robot interaction scenarios and propose a learning-based automatic trajectory generation model, which we call Multi-Agent TRajectory generation with dIverse conteXts (MATRIX). MATRIX is capable of generating interactive human behaviors in realistic diverse contexts. We achieve this goal by modeling the explicit and interpretable objectives so that MATRIX can generate human motions based on diverse destinations and heterogeneous behaviors. We carried out extensive comparison and ablation studies to illustrate the effectiveness of our approach across various metrics. We also presented experiments that demonstrate the capability of MATRIX to serve as data augmentation for imitation-based motion planning.
Online Learning Based Mobile Robot Controller Adaptation for Slip Reduction
Jan 30, 2023Slip is a very common phenomena present in wheeled mobile robotic systems. It has undesirable consequences such as wasting energy and impeding system stability. To tackle the challenge of mobile robot trajectory tracking under slippery conditions, we propose a hierarchical framework that learns and adapts gains of the tracking controllers simultaneously online. Concretely, a reinforcement learning (RL) module is used to auto-tune parameters in a lateral predictive controller and a longitudinal speed PID controller. Experiments show the necessity of simultaneous gain tuning, and have demonstrated that our online framework outperforms the best baseline controller using fixed gains. By utilizing online gain adaptation, our framework achieves robust tracking performance by rejecting slip and reducing tracking errors when the mobile robot travels through various terrains.
Online Learning in Planar Pushing with Combined Prediction Model
Oct 17, 2019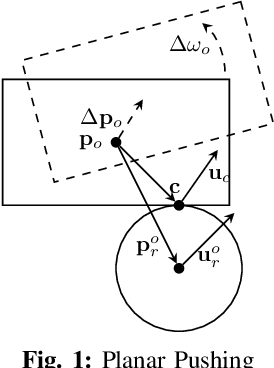


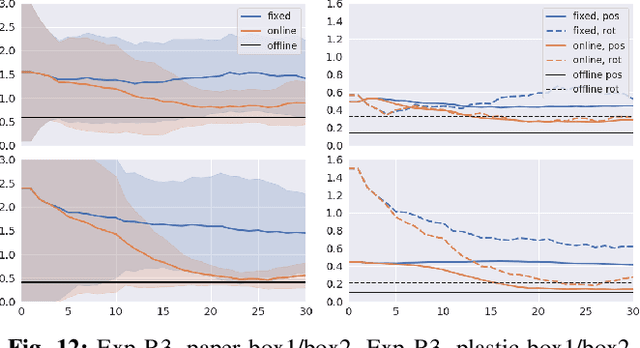
Pushing is a useful robotic capability for positioning and reorienting objects. The ability to accurately predict the effect of pushes can enable efficient trajectory planning and complicated object manipulation. Physical prediction models for planar pushing have long been established, but their assumptions and requirements usually don't hold in most practical settings. Data-driven approaches can provide accurate predictions for offline data, but they often have generalizability issues. In this paper, we propose a combined prediction model and an online learning framework for planar push prediction. The combined model consists of a neural network module and analytical components with a low-dimensional parameter. We train the neural network offline using pre-collected pushing data. In online situations, the low-dimensional analytical parameter is learned directly from online pushes to quickly adapt to the new environments. We test our combined model and learning framework on real pushing experiments. Our experimental results show that our model is able to quickly adapt to new environments while achieving similar final prediction performance as that of pure neural network models.