 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMObyGaze: a film dataset of multimodal objectification densely annotated by experts
May 28, 2025



Characterizing and quantifying gender representation disparities in audiovisual storytelling contents is necessary to grasp how stereotypes may perpetuate on screen. In this article, we consider the high-level construct of objectification and introduce a new AI task to the ML community: characterize and quantify complex multimodal (visual, speech, audio) temporal patterns producing objectification in films. Building on film studies and psychology, we define the construct of objectification in a structured thesaurus involving 5 sub-constructs manifesting through 11 concepts spanning 3 modalities. We introduce the Multimodal Objectifying Gaze (MObyGaze) dataset, made of 20 movies annotated densely by experts for objectification levels and concepts over freely delimited segments: it amounts to 6072 segments over 43 hours of video with fine-grained localization and categorization. We formulate different learning tasks, propose and investigate best ways to learn from the diversity of labels among a low number of annotators, and benchmark recent vision, text and audio models, showing the feasibility of the task. We make our code and our dataset available to the community and described in the Croissant format: https://anonymous.4open.science/r/MObyGaze-F600/.
Leveraging multimodal explanatory annotations for video interpretation with Modality Specific Dataset
Apr 15, 2025We examine the impact of concept-informed supervision on multimodal video interpretation models using MOByGaze, a dataset containing human-annotated explanatory concepts. We introduce Concept Modality Specific Datasets (CMSDs), which consist of data subsets categorized by the modality (visual, textual, or audio) of annotated concepts. Models trained on CMSDs outperform those using traditional legacy training in both early and late fusion approaches. Notably, this approach enables late fusion models to achieve performance close to that of early fusion models. These findings underscore the importance of modality-specific annotations in developing robust, self-explainable video models and contribute to advancing interpretable multimodal learning in complex video analysis.
DiVR: incorporating context from diverse VR scenes for human trajectory prediction
Nov 13, 2024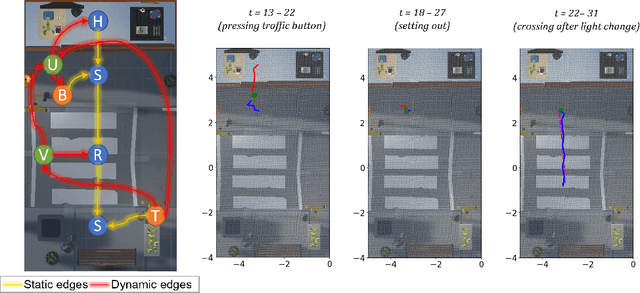


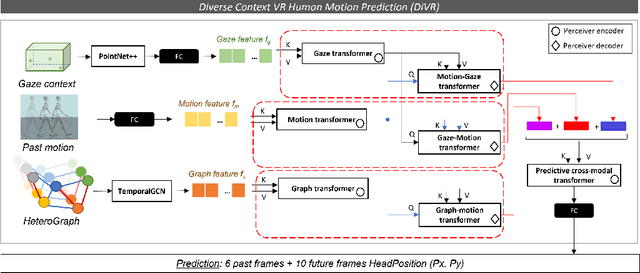
Virtual environments provide a rich and controlled setting for collecting detailed data on human behavior, offering unique opportunities for predicting human trajectories in dynamic scenes. However, most existing approaches have overlooked the potential of these environments, focusing instead on static contexts without considering userspecific factors. Employing the CREATTIVE3D dataset, our work models trajectories recorded in virtual reality (VR) scenes for diverse situations including road-crossing tasks with user interactions and simulated visual impairments. We propose Diverse Context VR Human Motion Prediction (DiVR), a cross-modal transformer based on the Perceiver architecture that integrates both static and dynamic scene context using a heterogeneous graph convolution network. We conduct extensive experiments comparing DiVR against existing architectures including MLP, LSTM, and transformers with gaze and point cloud context. Additionally, we also stress test our model's generalizability across different users, tasks, and scenes. Results show that DiVR achieves higher accuracy and adaptability compared to other models and to static graphs. This work highlights the advantages of using VR datasets for context-aware human trajectory modeling, with potential applications in enhancing user experiences in the metaverse. Our source code is publicly available at https://gitlab.inria.fr/ffrancog/creattive3d-divr-model.
Visual Objectification in Films: Towards a New AI Task for Video Interpretation
Jan 24, 2024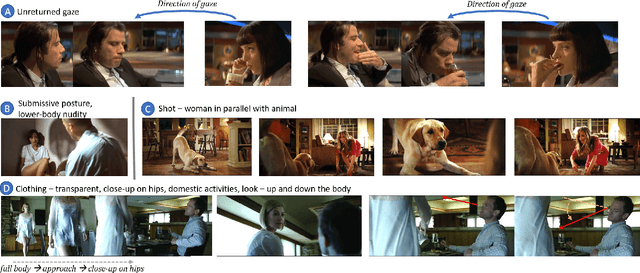
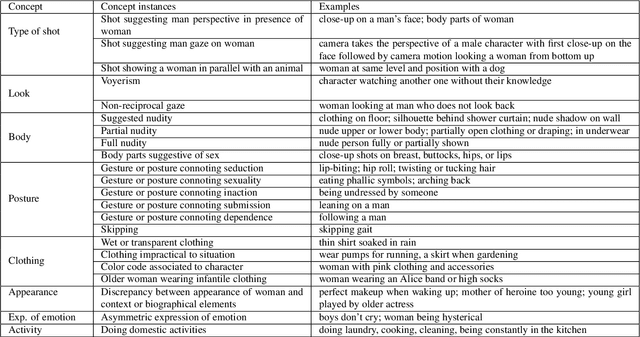
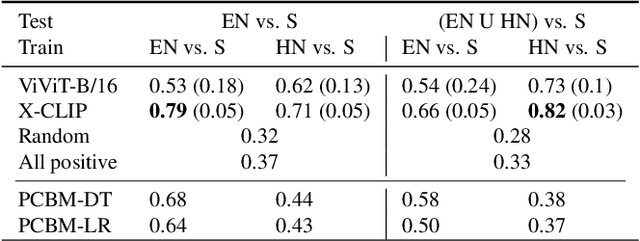
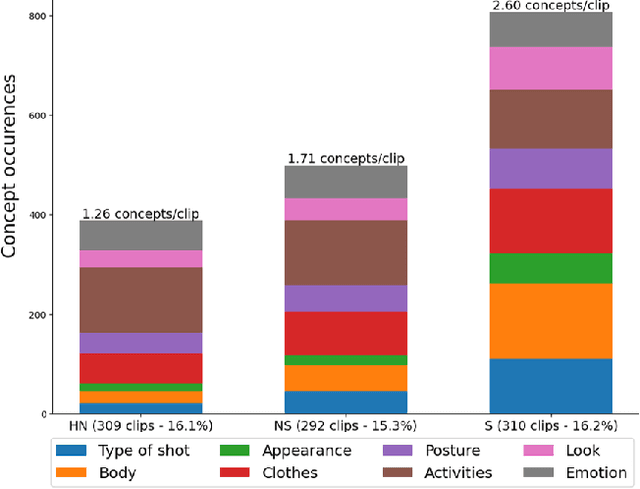
In film gender studies, the concept of 'male gaze' refers to the way the characters are portrayed on-screen as objects of desire rather than subjects. In this article, we introduce a novel video-interpretation task, to detect character objectification in films. The purpose is to reveal and quantify the usage of complex temporal patterns operated in cinema to produce the cognitive perception of objectification. We introduce the ObyGaze12 dataset, made of 1914 movie clips densely annotated by experts for objectification concepts identified in film studies and psychology. We evaluate recent vision models, show the feasibility of the task and where the challenges remain with concept bottleneck models. Our new dataset and code are made available to the community.