 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoint Cloud Recombination: Systematic Real Data Augmentation Using Robotic Targets for LiDAR Perception Validation
May 05, 2025The validation of LiDAR-based perception of intelligent mobile systems operating in open-world applications remains a challenge due to the variability of real environmental conditions. Virtual simulations allow the generation of arbitrary scenes under controlled conditions but lack physical sensor characteristics, such as intensity responses or material-dependent effects. In contrast, real-world data offers true sensor realism but provides less control over influencing factors, hindering sufficient validation. Existing approaches address this problem with augmentation of real-world point cloud data by transferring objects between scenes. However, these methods do not consider validation and remain limited in controllability because they rely on empirical data. We solve these limitations by proposing Point Cloud Recombination, which systematically augments captured point cloud scenes by integrating point clouds acquired from physical target objects measured in controlled laboratory environments. Thus enabling the creation of vast amounts and varieties of repeatable, physically accurate test scenes with respect to phenomena-aware occlusions with registered 3D meshes. Using the Ouster OS1-128 Rev7 sensor, we demonstrate the augmentation of real-world urban and rural scenes with humanoid targets featuring varied clothing and poses, for repeatable positioning. We show that the recombined scenes closely match real sensor outputs, enabling targeted testing, scalable failure analysis, and improved system safety. By providing controlled yet sensor-realistic data, our method enables trustworthy conclusions about the limitations of specific sensors in compound with their algorithms, e.g., object detection.
Data Quality Matters: Quantifying Image Quality Impact on Machine Learning Performance
Mar 28, 2025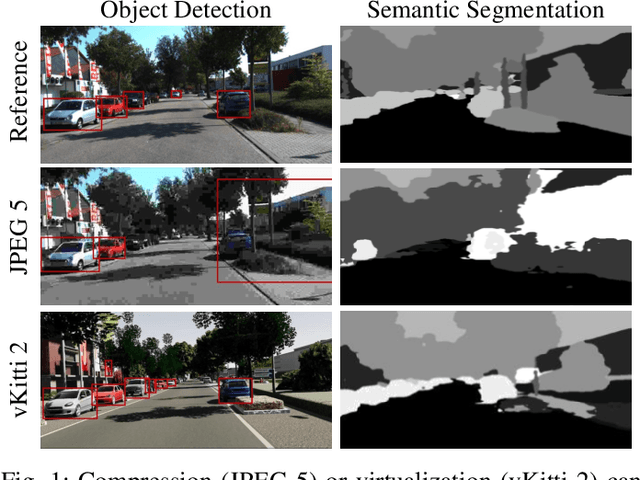
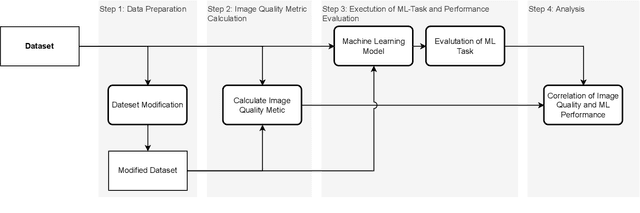
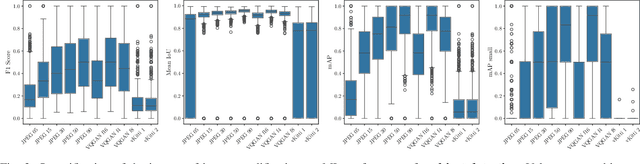
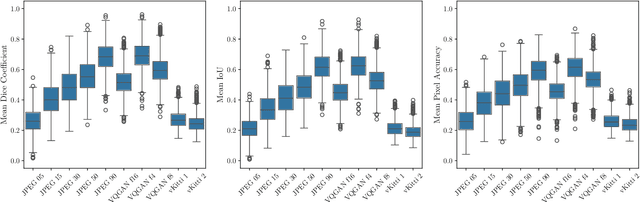
Precise perception of the environment is essential in highly automated driving systems, which rely on machine learning tasks such as object detection and segmentation. Compression of sensor data is commonly used for data handling, while virtualization is used for hardware-in-the-loop validation. Both methods can alter sensor data and degrade model performance. This necessitates a systematic approach to quantifying image validity. This paper presents a four-step framework to evaluate the impact of image modifications on machine learning tasks. First, a dataset with modified images is prepared to ensure one-to-one matching image pairs, enabling measurement of deviations resulting from compression and virtualization. Second, image deviations are quantified by comparing the effects of compression and virtualization against original camera-based sensor data. Third, the performance of state-of-the-art object detection models is analyzed to determine how altered input data affects perception tasks, including bounding box accuracy and reliability. Finally, a correlation analysis is performed to identify relationships between image quality and model performance. As a result, the LPIPS metric achieves the highest correlation between image deviation and machine learning performance across all evaluated machine learning tasks.
The Machine Vision Iceberg Explained: Advancing Dynamic Testing by Considering Holistic Environmental Circumstances
Feb 05, 2024Are we heading for an iceberg with the current testing of machine vision? This work delves into the landscape of Machine Vision (MV) testing, which is heavily required in Highly Automated Driving (HAD) systems. Utilizing the metaphorical notion of navigating towards an iceberg, we discuss the potential shortcomings concealed within current testing strategies. We emphasize the urgent need for a deeper understanding of how to deal with the opaque functions of MV in development processes. As overlooked considerations can cost lives. Our main contribution is the hierarchical level model, which we call Granularity Grades. The model encourages a refined exploration of the multi-scaled depths of understanding about the circumstances of environments in which MV is intended to operate. This model aims to provide a holistic overview of all entities that may impact MV functions, ranging from relations of individual entities like object attributes to entire environmental scenes. The application of our model delivers a structured exploration of entities in a specific domain, their relationships and assigning results of a MV-under-test to construct an entity-relationship graph. Through clustering patterns of relations in the graph general MV deficits are arguable. In Summary, our work contributes to a more nuanced and systematized identification of deficits of a MV test object in correlation to holistic circumstances in HAD operating domains.