 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData Quality Matters: Quantifying Image Quality Impact on Machine Learning Performance
Paper and Code
Mar 28, 2025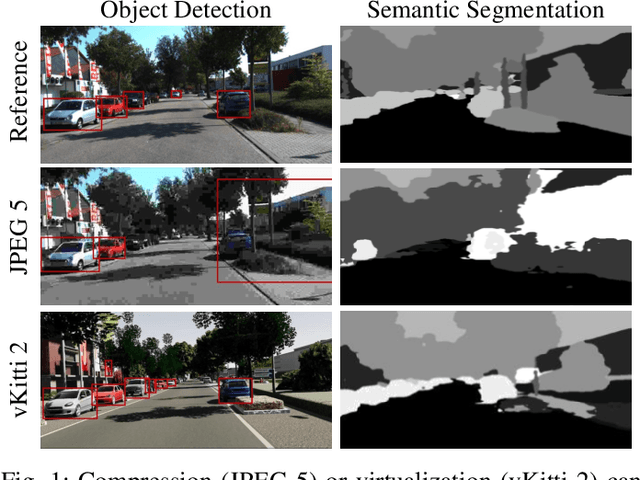
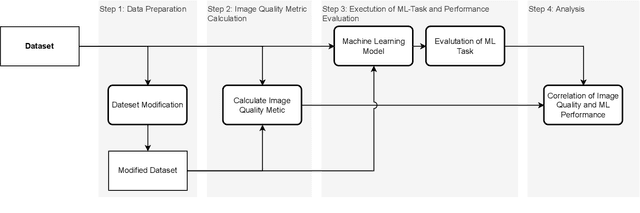
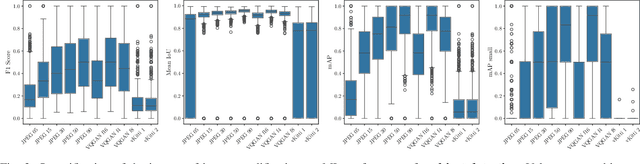
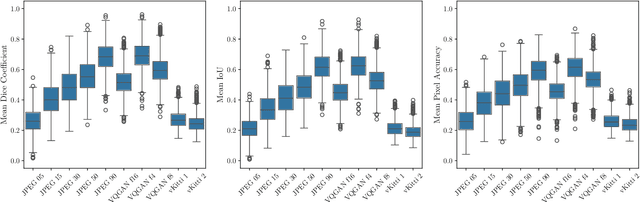
Precise perception of the environment is essential in highly automated driving systems, which rely on machine learning tasks such as object detection and segmentation. Compression of sensor data is commonly used for data handling, while virtualization is used for hardware-in-the-loop validation. Both methods can alter sensor data and degrade model performance. This necessitates a systematic approach to quantifying image validity. This paper presents a four-step framework to evaluate the impact of image modifications on machine learning tasks. First, a dataset with modified images is prepared to ensure one-to-one matching image pairs, enabling measurement of deviations resulting from compression and virtualization. Second, image deviations are quantified by comparing the effects of compression and virtualization against original camera-based sensor data. Third, the performance of state-of-the-art object detection models is analyzed to determine how altered input data affects perception tasks, including bounding box accuracy and reliability. Finally, a correlation analysis is performed to identify relationships between image quality and model performance. As a result, the LPIPS metric achieves the highest correlation between image deviation and machine learning performance across all evaluated machine learning tasks.