 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy-Aware Lane Planning for Connected Electric Vehicles in Urban Traffic: Design and Vehicle-in-the-Loop Validation
Mar 29, 2025Urban driving with connected and automated vehicles (CAVs) offers potential for energy savings, yet most eco-driving strategies focus solely on longitudinal speed control within a single lane. This neglects the significant impact of lateral decisions, such as lane changes, on overall energy efficiency, especially in environments with traffic signals and heterogeneous traffic flow. To address this gap, we propose a novel energy-aware motion planning framework that jointly optimizes longitudinal speed and lateral lane-change decisions using vehicle-to-infrastructure (V2I) communication. Our approach estimates long-term energy costs using a graph-based approximation and solves short-horizon optimal control problems under traffic constraints. Using a data-driven energy model calibrated to an actual battery electric vehicle, we demonstrate with vehicle-in-the-loop experiments that our method reduces motion energy consumption by up to 24 percent compared to a human driver, highlighting the potential of connectivity-enabled planning for sustainable urban autonomy.
Predictive Control for Autonomous Driving with Uncertain, Multi-modal Predictions
Oct 31, 2023



We propose a Stochastic MPC (SMPC) formulation for path planning with autonomous vehicles in scenarios involving multiple agents with multi-modal predictions. The multi-modal predictions capture the uncertainty of urban driving in distinct modes/maneuvers (e.g., yield, keep speed) and driving trajectories (e.g., speed, turning radius), which are incorporated for multi-modal collision avoidance chance constraints for path planning. In the presence of multi-modal uncertainties, it is challenging to reliably compute feasible path planning solutions at real-time frequencies ($\geq$ 10 Hz). Our main technological contribution is a convex SMPC formulation that simultaneously (1) optimizes over parameterized feedback policies and (2) allocates risk levels for each mode of the prediction. The use of feedback policies and risk allocation enhances the feasibility and performance of the SMPC formulation against multi-modal predictions with large uncertainty. We evaluate our approach via simulations and road experiments with a full-scale vehicle interacting in closed-loop with virtual vehicles. We consider distinct, multi-modal driving scenarios: 1) Negotiating a traffic light and a fast, tailgating agent, 2) Executing an unprotected left turn at a traffic intersection, and 3) Changing lanes in the presence of multiple agents. For all of these scenarios, our approach reliably computes multi-modal solutions to the path-planning problem at real-time frequencies.
Energy-Efficient Lane Changes Planning and Control for Connected Autonomous Vehicles on Urban Roads
Apr 17, 2023This paper presents a novel energy-efficient motion planning algorithm for Connected Autonomous Vehicles (CAVs) on urban roads. The approach consists of two components: a decision-making algorithm and an optimization-based trajectory planner. The decision-making algorithm leverages Signal Phase and Timing (SPaT) information from connected traffic lights to select a lane with the aim of reducing energy consumption. The algorithm is based on a heuristic rule which is learned from human driving data. The optimization-based trajectory planner generates a safe, smooth, and energy-efficient trajectory toward the selected lane. The proposed strategy is experimentally evaluated in a Vehicle-in-the-Loop (VIL) setting, where a real test vehicle receives SPaT information from both actual and virtual traffic lights and autonomously drives on a testing site, while the surrounding vehicles are simulated. The results demonstrate that the use of SPaT information in autonomous driving leads to improved energy efficiency, with the proposed strategy saving 37.1% energy consumption compared to a lane-keeping algorithm.
Learning How to Solve Bubble Ball
Nov 20, 2020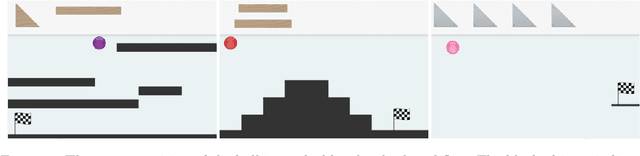
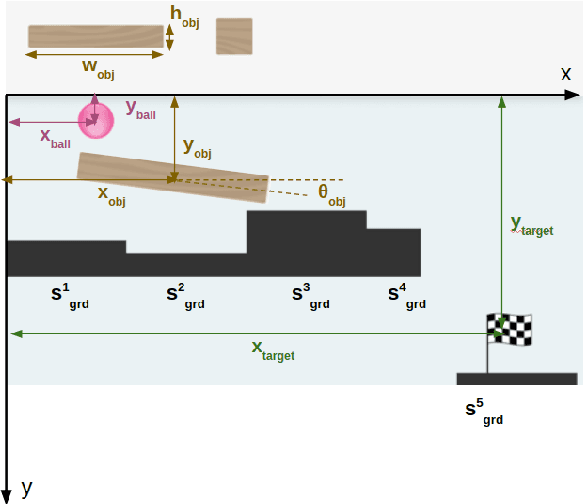

"Bubble Ball" is a game built on a 2D physics engine, where a finite set of objects can modify the motion of a bubble-like ball. The objective is to choose the set and the initial configuration of the objects, in order to get the ball to reach a target flag. The presence of obstacles, friction, contact forces and combinatorial object choices make the game hard to solve. In this paper, we propose a hierarchical predictive framework which solves Bubble Ball. Geometric, kinematic and dynamic models are used at different levels of the hierarchy. At each level of the game, data collected during failed iterations are used to update models at all hierarchical level and converge to a feasible solution to the game. The proposed approach successfully solves a large set of Bubble Ball levels within reasonable number of trials. This proposed framework can also be used to solve other physics-based games, especially with limited training data from human demonstrations.