 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning for Delay-Oriented IoT Task Scheduling in Space-Air-Ground Integrated Network
Oct 04, 2020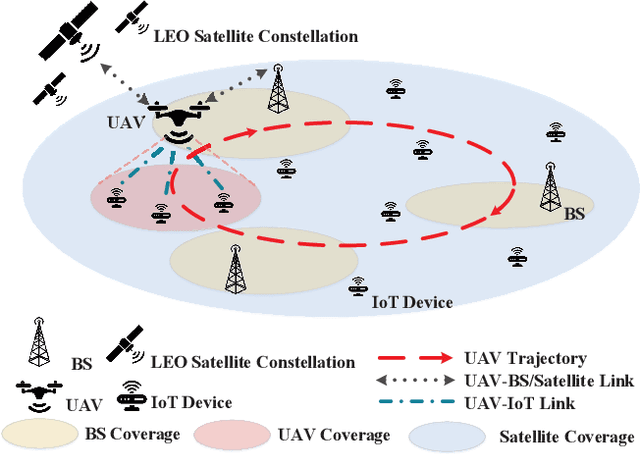
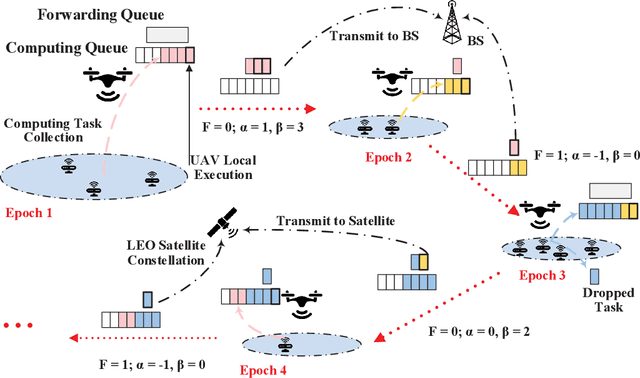
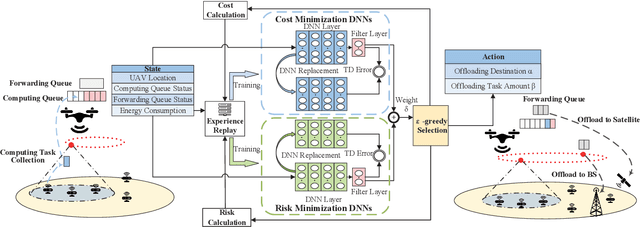
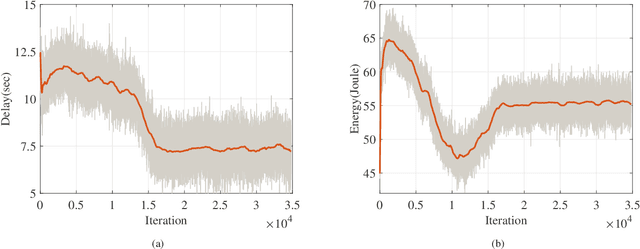
In this paper, we investigate a computing task scheduling problem in space-air-ground integrated network (SAGIN) for delay-oriented Internet of Things (IoT) services. In the considered scenario, an unmanned aerial vehicle (UAV) collects computing tasks from IoT devices and then makes online offloading decisions, in which the tasks can be processed at the UAV or offloaded to the nearby base station or the remote satellite. Our objective is to design a task scheduling policy that minimizes offloading and computing delay of all tasks given the UAV energy capacity constraint. To this end, we first formulate the online scheduling problem as an energy-constrained Markov decision process (MDP). Then, considering the task arrival dynamics, we develop a novel deep risk-sensitive reinforcement learning algorithm. Specifically, the algorithm evaluates the risk, which measures the energy consumption that exceeds the constraint, for each state and searches the optimal parameter weighing the minimization of delay and risk while learning the optimal policy. Extensive simulation results demonstrate that the proposed algorithm can reduce the task processing delay by up to 30% compared to probabilistic configuration methods while satisfying the UAV energy capacity constraint.