 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRaP-Net: A Region-wise and Point-wise Weighting Network to Extract Robust Keypoints for Indoor Localization
Dec 01, 2020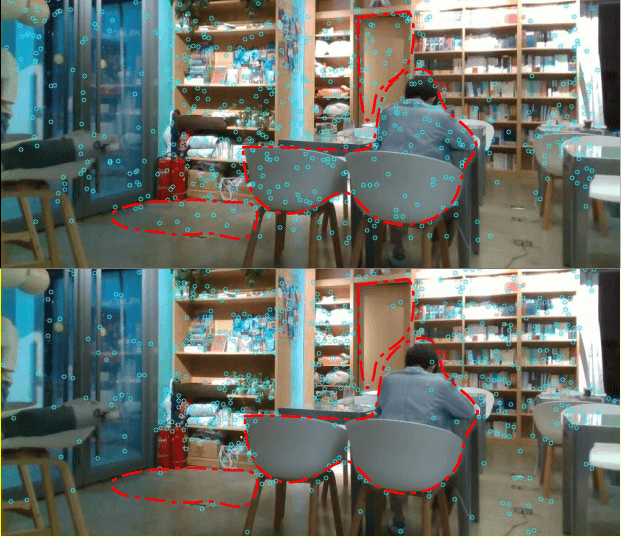
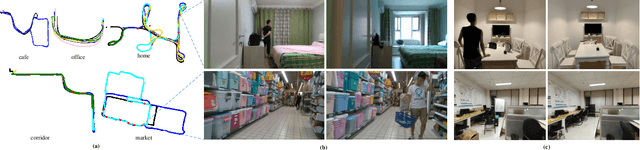
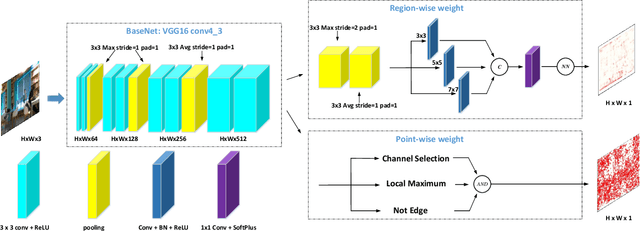
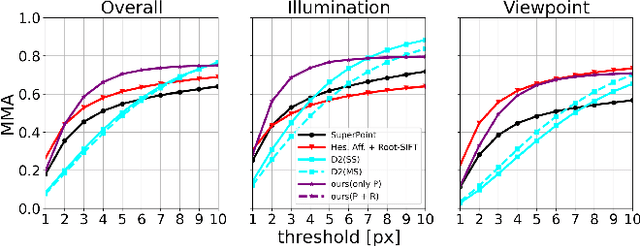
Image keypoint extraction is an important step for visual localization. The localization in indoor environment is challenging for that there may be many unreliable features on dynamic or repetitive objects. Such kind of reliability cannot be well learned by existing Convolutional Neural Network (CNN) based feature extractors. We propose a novel network, RaP-Net, which explicitly addresses feature invariability with a region-wise predictor, and combines it with a point-wise predictor to select reliable keypoints in an image. We also build a new dataset, OpenLORIS-Location, to train this network. The dataset contains 1553 indoor images with location labels. There are various scene changes between images on the same location, which can help a network to learn the invariability in typical indoor scenes. Experimental results show that the proposed RaP-Net trained with the OpenLORIS-Location dataset significantly outperforms existing CNN-based keypoint extraction algorithms for indoor localization. The code and data are available at https://github.com/ivipsourcecode/RaP-Net.