 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEasyControlEdge: A Foundation-Model Fine-Tuning for Edge Detection
Feb 18, 2026We propose EasyControlEdge, adapting an image-generation foundation model to edge detection. In real-world edge detection (e.g., floor-plan walls, satellite roads/buildings, and medical organ boundaries), crispness and data efficiency are crucial, yet producing crisp raw edge maps with limited training samples remains challenging. Although image-generation foundation models perform well on many downstream tasks, their pretrained priors for data-efficient transfer and iterative refinement for high-frequency detail preservation remain underexploited for edge detection. To enable crisp and data-efficient edge detection using these capabilities, we introduce an edge-specialized adaptation of image-generation foundation models. To better specialize the foundation model for edge detection, we incorporate an edge-oriented objective with an efficient pixel-space loss. At inference, we introduce guidance based on unconditional dynamics, enabling a single model to control the edge density through a guidance scale. Experiments on BSDS500, NYUDv2, BIPED, and CubiCasa compare against state-of-the-art methods and show consistent gains, particularly under no-post-processing crispness evaluation and with limited training data.
Collision-free Path Planning on Arbitrary Optimization Criteria in the Latent Space through cGANs
Feb 26, 2022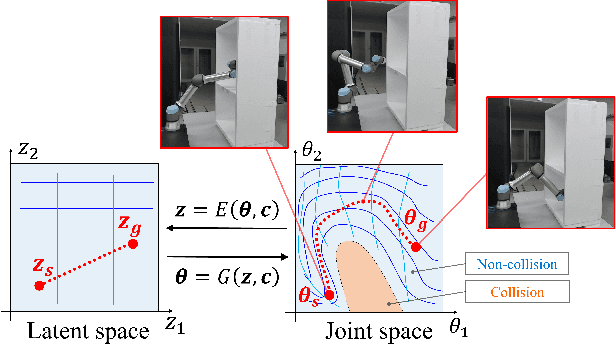
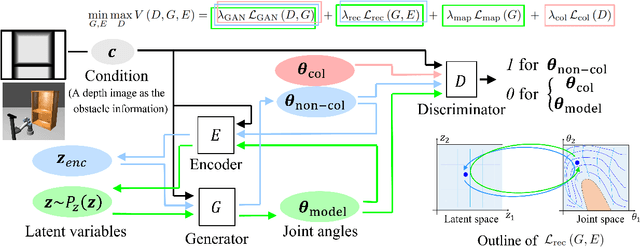
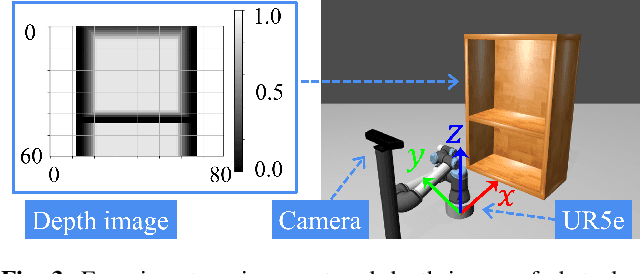
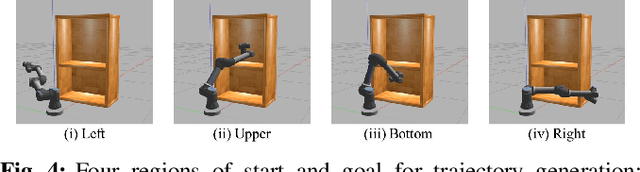
We propose a new method for collision-free path planning by Conditional Generative Adversarial Networks (cGANs) by mapping its latent space to only the collision-free areas of the robot joint space when an obstacle map is given as a condition. When manipulating a robot arm, it is necessary to generate a trajectory that avoids contact with the robot itself or the surrounding environment for safety reasons, and it is convenient to generate multiple arbitrary trajectories appropriate for respective purposes. In the proposed method, various trajectories to avoid obstacles can be generated by connecting the start and goal with arbitrary line segments in this latent space. Our method simply provides this collision-free latent space after which any planner, using any optimization conditions, can be used to generate the most suitable paths on the fly. We successfully verified this method with a simulated and actual UR5e 6-DoF robotic arm. We confirmed that different trajectories can be generated according to different optimization conditions.