 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoCap: A Robotic Data Collection Pipeline for the Pose Estimation of Appearance-Changing Objects
Jul 10, 2024



Object pose estimation plays a vital role in mixed-reality interactions when users manipulate tangible objects as controllers. Traditional vision-based object pose estimation methods leverage 3D reconstruction to synthesize training data. However, these methods are designed for static objects with diffuse colors and do not work well for objects that change their appearance during manipulation, such as deformable objects like plush toys, transparent objects like chemical flasks, reflective objects like metal pitchers, and articulated objects like scissors. To address this limitation, we propose Rocap, a robotic pipeline that emulates human manipulation of target objects while generating data labeled with ground truth pose information. The user first gives the target object to a robotic arm, and the system captures many pictures of the object in various 6D configurations. The system trains a model by using captured images and their ground truth pose information automatically calculated from the joint angles of the robotic arm. We showcase pose estimation for appearance-changing objects by training simple deep-learning models using the collected data and comparing the results with a model trained with synthetic data based on 3D reconstruction via quantitative and qualitative evaluation. The findings underscore the promising capabilities of Rocap.
Visual Task Progress Estimation with Appearance Invariant Embeddings for Robot Control and Planning
Mar 17, 2020


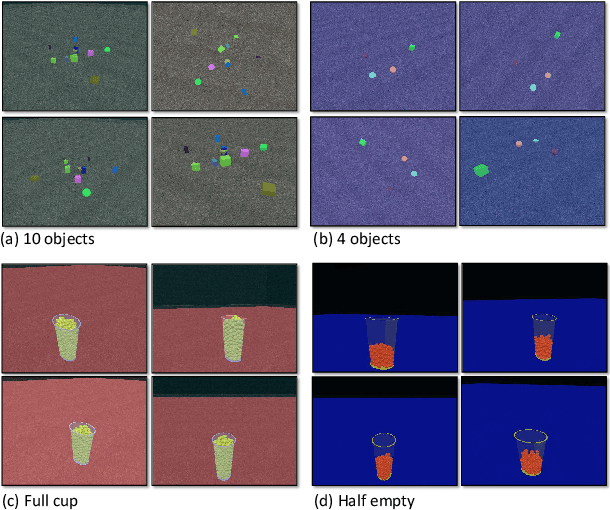
To fulfill the vision of full autonomy, robots must be capable of reasoning about the state of the world. In vision-based tasks, this means that a robot must understand the dissimilarities between its current perception of the environment with that of another state. To be of practical use, this dissimilarity must be quantifiable and computed over scenes with different viewpoints, nature (simulated vs. real), and appearances (shape, color, luminosity, etc.). Motivated by this problem, we propose an approach that uses the consistency of the progress among different examples and viewpoints of a task to train a deep neural network to map images into measurable features. Our method builds upon Time-Contrastive Networks (TCNs), originally proposed as a representation for continuous visuomotor skill learning, to train the network using only discrete snapshots taken at different stages of a task such that the network becomes sensitive to differences in task phases. We associate these embeddings to a sequence of images representing gradual task accomplishment, allowing a robot to iteratively query its motion planner with the current visual state to solve long-horizon tasks. We quantify the granularity achieved by the network in recognizing the number of objects in a scene and in measuring the volume of liquid in a cup. Our experiments leverage this granularity to make a mobile robot move a desired number of objects into a storage area and to control the amount of pouring in a cup.