 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn IoT-Based Controlled Environment Storage for Prevention of Spoilage of Onion (Allium Cepa) During Post-Harvest with UV-C Disinfection
Jan 11, 2026India is the second largest producer of onions in the world, contributing over 26 million tonnes annually. However, during storage, approximately 30-40% of onions are lost due to rotting, sprouting, and weight loss. Despite being a major producer, conventional storage methods are either low-cost but ineffective (traditional storage with 40% spoilage) or highly effective but prohibitively expensive for small farmers (cold storage). This paper presents a low-cost IoT-based smart onion storage system that monitors and automatically regulates environmental parameters including temperature, humidity, and spoilage gases using ESP32 microcontroller, DHT22 sensor, MQ-135 gas sensor, and UV-C disinfection technology. The proposed system aims to reduce onion spoilage to 15-20% from the current 40-45% wastage rate while remaining affordable for small and marginal farmers who constitute the majority in India. The system is designed to be cost-effective (estimated 60k-70k INR), energy-efficient, farmer-friendly, and solar-powered.
Temporal Graph Network: Hallucination Detection in Multi-Turn Conversation
Jan 06, 2026Hallucinations can be produced by conversational AI systems, particularly in multi-turn conversations where context changes and contradictions may eventually surface. By representing the entire conversation as a temporal graph, we present a novel graph-based method for detecting dialogue-level hallucinations. Our framework models each dialogue as a node, encoding it using a sentence transformer. We explore two different ways of connectivity: i) shared-entity edges, which connect turns that refer to the same entities; ii) temporal edges, which connect contiguous turns in the conversation. Message-passing is used to update the node embeddings, allowing flow of information between related nodes. The context-aware node embeddings are then combined using attention pooling into a single vector, which is then passed on to a classifier to determine the presence and type of hallucinations. We demonstrate that our method offers slightly improved performance over existing methods. Further, we show the attention mechanism can be used to justify the decision making process. The code and model weights are made available at: https://github.com/sambuaneesh/anlp-project.
Nearest Neighbor Projection Removal Adversarial Training
Sep 10, 2025Deep neural networks have exhibited impressive performance in image classification tasks but remain vulnerable to adversarial examples. Standard adversarial training enhances robustness but typically fails to explicitly address inter-class feature overlap, a significant contributor to adversarial susceptibility. In this work, we introduce a novel adversarial training framework that actively mitigates inter-class proximity by projecting out inter-class dependencies from adversarial and clean samples in the feature space. Specifically, our approach first identifies the nearest inter-class neighbors for each adversarial sample and subsequently removes projections onto these neighbors to enforce stronger feature separability. Theoretically, we demonstrate that our proposed logits correction reduces the Lipschitz constant of neural networks, thereby lowering the Rademacher complexity, which directly contributes to improved generalization and robustness. Extensive experiments across standard benchmarks including CIFAR-10, CIFAR-100, and SVHN show that our method demonstrates strong performance that is competitive with leading adversarial training techniques, highlighting significant achievements in both robust and clean accuracy. Our findings reveal the importance of addressing inter-class feature proximity explicitly to bolster adversarial robustness in DNNs.
Kernel Dynamic Mode Decomposition For Sparse Reconstruction of Closable Koopman Operators
May 11, 2025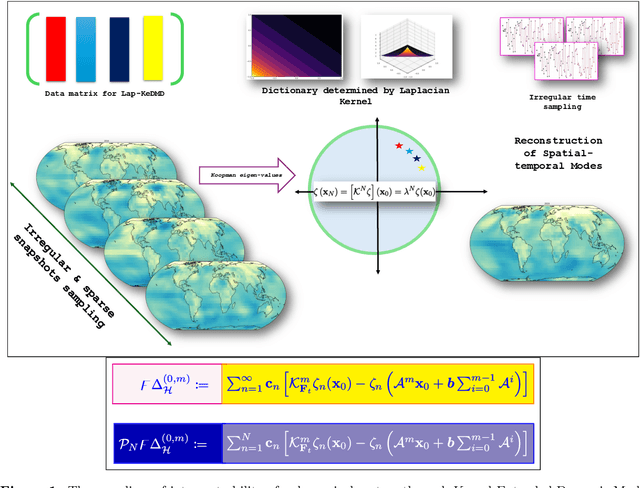
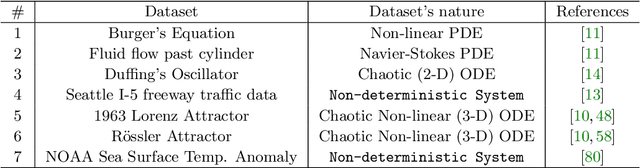
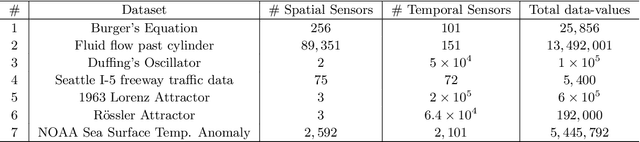
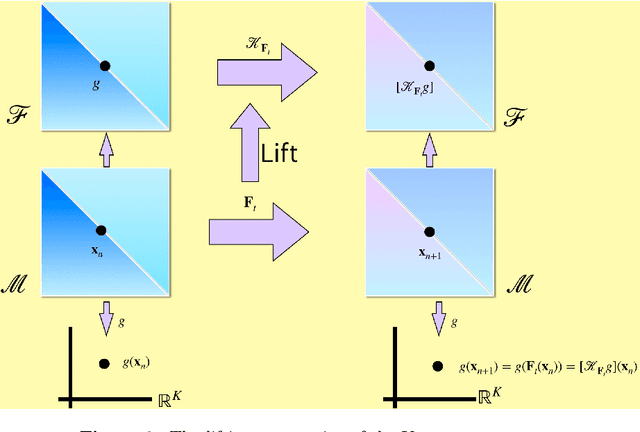
Spatial temporal reconstruction of dynamical system is indeed a crucial problem with diverse applications ranging from climate modeling to numerous chaotic and physical processes. These reconstructions are based on the harmonious relationship between the Koopman operators and the choice of dictionary, determined implicitly by a kernel function. This leads to the approximation of the Koopman operators in a reproducing kernel Hilbert space (RKHS) associated with that kernel function. Data-driven analysis of Koopman operators demands that Koopman operators be closable over the underlying RKHS, which still remains an unsettled, unexplored, and critical operator-theoretic challenge. We aim to address this challenge by investigating the embedding of the Laplacian kernel in the measure-theoretic sense, giving rise to a rich enough RKHS to settle the closability of the Koopman operators. We leverage Kernel Extended Dynamic Mode Decomposition with the Laplacian kernel to reconstruct the dominant spatial temporal modes of various diverse dynamical systems. After empirical demonstration, we concrete such results by providing the theoretical justification leveraging the closability of the Koopman operators on the RKHS generated by the Laplacian kernel on the avenues of Koopman mode decomposition and the Koopman spectral measure. Such results were explored from both grounds of operator theory and data-driven science, thus making the Laplacian kernel a robust choice for spatial-temporal reconstruction.
An appointment with Reproducing Kernel Hilbert Space generated by Generalized Gaussian RBF as $L^2-$measure
Dec 17, 2023Gaussian Radial Basis Function (RBF) Kernels are the most-often-employed kernels in artificial intelligence and machine learning routines for providing optimally-best results in contrast to their respective counter-parts. However, a little is known about the application of the Generalized Gaussian Radial Basis Function on various machine learning algorithms namely, kernel regression, support vector machine (SVM) and pattern-recognition via neural networks. The results that are yielded by Generalized Gaussian RBF in the kernel sense outperforms in stark contrast to Gaussian RBF Kernel, Sigmoid Function and ReLU Function. This manuscript demonstrates the application of the Generalized Gaussian RBF in the kernel sense on the aforementioned machine learning routines along with the comparisons against the aforementioned functions as well.
Language Guided Adversarial Purification
Sep 19, 2023


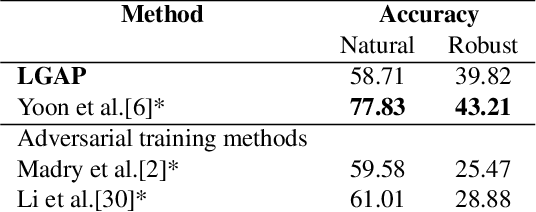
Adversarial purification using generative models demonstrates strong adversarial defense performance. These methods are classifier and attack-agnostic, making them versatile but often computationally intensive. Recent strides in diffusion and score networks have improved image generation and, by extension, adversarial purification. Another highly efficient class of adversarial defense methods known as adversarial training requires specific knowledge of attack vectors, forcing them to be trained extensively on adversarial examples. To overcome these limitations, we introduce a new framework, namely Language Guided Adversarial Purification (LGAP), utilizing pre-trained diffusion models and caption generators to defend against adversarial attacks. Given an input image, our method first generates a caption, which is then used to guide the adversarial purification process through a diffusion network. Our approach has been evaluated against strong adversarial attacks, proving its effectiveness in enhancing adversarial robustness. Our results indicate that LGAP outperforms most existing adversarial defense techniques without requiring specialized network training. This underscores the generalizability of models trained on large datasets, highlighting a promising direction for further research.
Learning Neuro-symbolic Programs for Language Guided Robot Manipulation
Nov 12, 2022



Given a natural language instruction, and an input and an output scene, our goal is to train a neuro-symbolic model which can output a manipulation program that can be executed by the robot on the input scene resulting in the desired output scene. Prior approaches for this task possess one of the following limitations: (i) rely on hand-coded symbols for concepts limiting generalization beyond those seen during training [1] (ii) infer action sequences from instructions but require dense sub-goal supervision [2] or (iii) lack semantics required for deeper object-centric reasoning inherent in interpreting complex instructions [3]. In contrast, our approach is neuro-symbolic and can handle linguistic as well as perceptual variations, is end-to-end differentiable requiring no intermediate supervision, and makes use of symbolic reasoning constructs which operate on a latent neural object-centric representation, allowing for deeper reasoning over the input scene. Central to our approach is a modular structure, consisting of a hierarchical instruction parser, and a manipulation module to learn disentangled action representations, both trained via RL. Our experiments on a simulated environment with a 7-DOF manipulator, consisting of instructions with varying number of steps, as well as scenes with different number of objects, and objects with unseen attribute combinations, demonstrate that our model is robust to such variations, and significantly outperforms existing baselines, particularly in generalization settings.