 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Neuro-symbolic Programs for Language Guided Robot Manipulation
Nov 12, 2022



Given a natural language instruction, and an input and an output scene, our goal is to train a neuro-symbolic model which can output a manipulation program that can be executed by the robot on the input scene resulting in the desired output scene. Prior approaches for this task possess one of the following limitations: (i) rely on hand-coded symbols for concepts limiting generalization beyond those seen during training [1] (ii) infer action sequences from instructions but require dense sub-goal supervision [2] or (iii) lack semantics required for deeper object-centric reasoning inherent in interpreting complex instructions [3]. In contrast, our approach is neuro-symbolic and can handle linguistic as well as perceptual variations, is end-to-end differentiable requiring no intermediate supervision, and makes use of symbolic reasoning constructs which operate on a latent neural object-centric representation, allowing for deeper reasoning over the input scene. Central to our approach is a modular structure, consisting of a hierarchical instruction parser, and a manipulation module to learn disentangled action representations, both trained via RL. Our experiments on a simulated environment with a 7-DOF manipulator, consisting of instructions with varying number of steps, as well as scenes with different number of objects, and objects with unseen attribute combinations, demonstrate that our model is robust to such variations, and significantly outperforms existing baselines, particularly in generalization settings.
Accelerating 2PC-based ML with Limited Trusted Hardware
Sep 11, 2020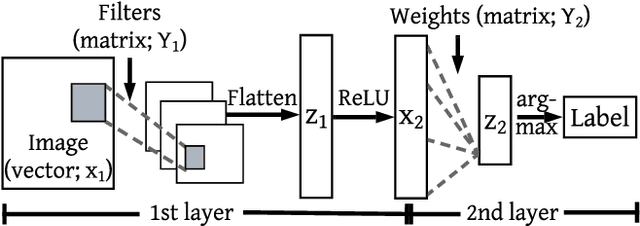

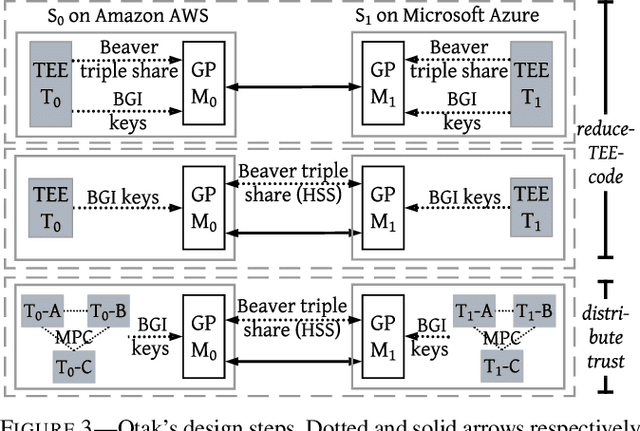
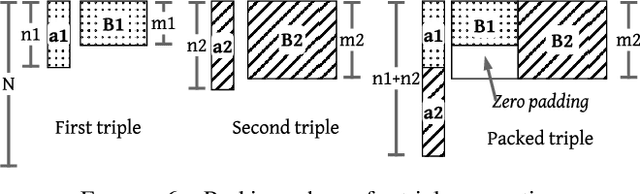
This paper describes the design, implementation, and evaluation of Otak, a system that allows two non-colluding cloud providers to run machine learning (ML) inference without knowing the inputs to inference. Prior work for this problem mostly relies on advanced cryptography such as two-party secure computation (2PC) protocols that provide rigorous guarantees but suffer from high resource overhead. Otak improves efficiency via a new 2PC protocol that (i) tailors recent primitives such as function and homomorphic secret sharing to ML inference, and (ii) uses trusted hardware in a limited capacity to bootstrap the protocol. At the same time, Otak reduces trust assumptions on trusted hardware by running a small code inside the hardware, restricting its use to a preprocessing step, and distributing trust over heterogeneous trusted hardware platforms from different vendors. An implementation and evaluation of Otak demonstrates that its CPU and network overhead converted to a dollar amount is 5.4$-$385$\times$ lower than state-of-the-art 2PC-based works. Besides, Otak's trusted computing base (code inside trusted hardware) is only 1,300 lines of code, which is 14.6$-$29.2$\times$ lower than the code-size in prior trusted hardware-based works.