 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Neck Orthosis with Multi-Directional Variable Stiffness for Persons with Dropped Head Syndrome
Jun 11, 2024



Dropped Head Syndrome (DHS) causes a passively correctable neck deformation. Currently, there is no wearable orthopedic neck brace to fulfill the needs of persons suffering from DHS. Related works have made progress in this area by creating mobile neck braces that provide head support to mitigate deformation while permitting neck mobility, which enhances user-perceived comfort and quality of life. Specifically, passive designs show great potential for fully functional devices in the short term due to their inherent simplicity and compactness, although achieving suitable support presents some challenges. This work introduces a novel compliant mechanism that provides non-restrictive adjustable support for the neck's anterior and posterior flexion movements while enabling its unconstrained free rotation. The results from the experiments on non-affected persons suggest that the device provides the proposed adjustable support that unloads the muscle groups involved in supporting the head without overloading the antagonist muscle groups. Simultaneously, it was verified that the free rotation is achieved regardless of the stiffness configuration of the device.
* Accepted Manuscript
Design of a Multi-Degree-of-Freedom Elastic Neck Exoskeleton for Persons with Dropped Head Syndrome
Mar 11, 2023Nonsurgical treatment of Dropped Head Syndrome (DHS) incurs the use of collar-type orthoses that immobilize the neck and cause discomfort and sores under the chin. Articulated orthoses have the potential to support the head posture while allowing partial mobility of the neck and reduced discomfort and sores. This work presents the design, modeling, development, and characterization of a novel multi-degree-of-freedom elastic mechanism designed for neck support. This new type of elastic mechanism allows the bending of the head in the sagittal and coronal planes, and head rotations in the transverse plane. From these articulate movements, the mechanism generates moments that restore the head and neck to the upright posture, thus compensating for the muscle weakness caused by DHS. The experimental results show adherence to the empirical characterization of the elastic mechanism under flexion to the model-based calculations. A neck support orthosis prototype based on the proposed mechanism is presented, which enables the three before-mentioned head motions of a healthy participant, according to the results of preliminary tests.
Personal Mobility With Synchronous Trunk-Knee Passive Exoskeleton: Optimizing Human-Robot Energy Transfer
Jan 10, 2022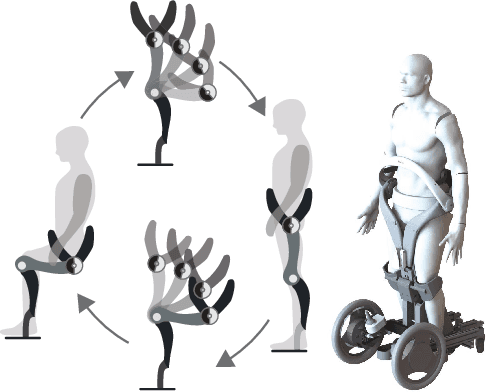

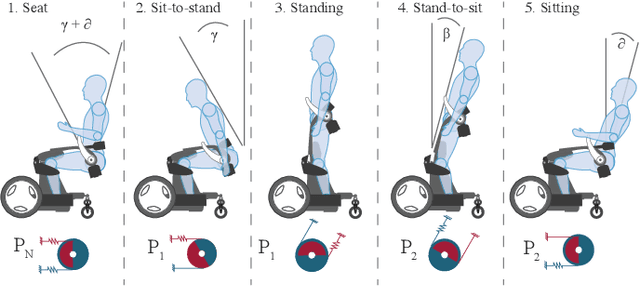
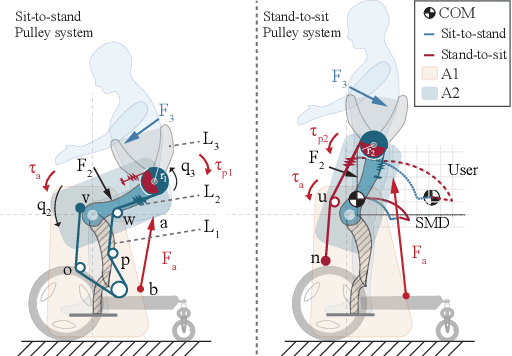
We present a personal mobility device for lower-body impaired users through a light-weighted exoskeleton on wheels. On its core, a novel passive exoskeleton provides postural transition leveraging natural body postures with support to the trunk on sit-to-stand and stand-to-sit (STS) transitions by a single gas spring as an energy storage unit. We propose a direction-dependent coupling of knees and hip joints through a double-pulley wire system, transferring energy from the torso motion towards balancing the moment load at the knee joint actuator. Herewith, the exoskeleton maximizes energy transfer and the naturalness of the user's movement. We introduce an embodied user interface for hands-free navigation through a torso pressure sensing with minimal trunk rotations, resulting on average $19^{\circ} \pm 13^{\circ}$ on six unimpaired users. We evaluated the design for STS assistance on 11 unimpaired users observing motions and muscle activity during the transitions. Results comparing assisted and unassisted STS transitions validated a significant reduction (up to $68\%$ $p<0.01$) at the involved muscle groups. Moreover, we showed it feasible through natural torso leaning movements of $+12^{\circ}\pm 6.5^{\circ}$ and $- 13.7^{\circ} \pm 6.1^{\circ}$ for standing and sitting, respectively. Passive postural transition assistance warrants further work on increasing its applicability and broadening the user population.
Passive Flow Control for Series Inflatable Actuators: Application on a Wearable Soft-Robot for Posture Assistance
Mar 09, 2021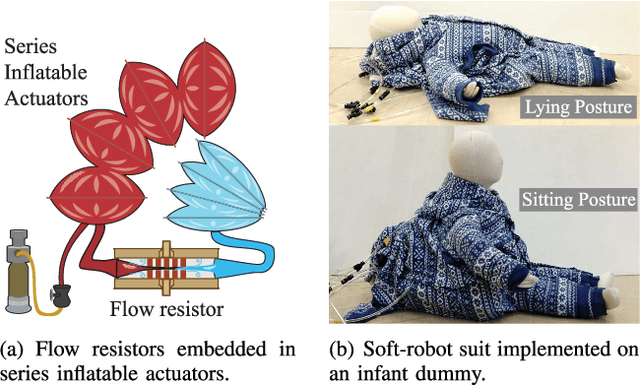
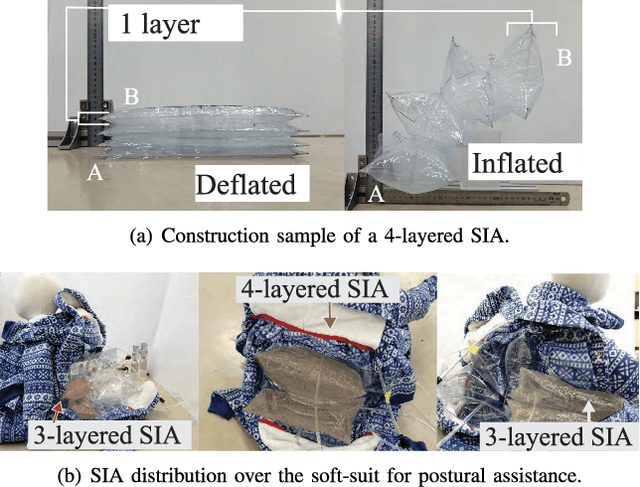
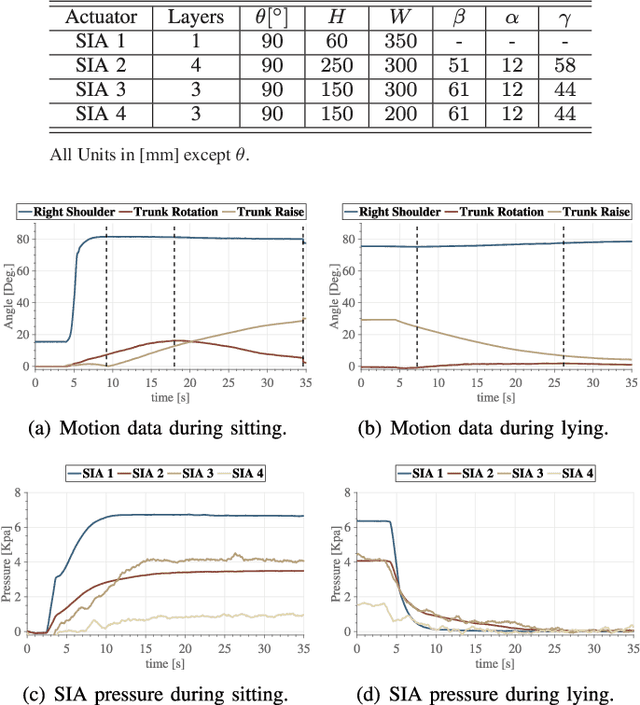

This paper presents a passive control method for multiple degrees of freedom in a soft pneumatic robot through the combination of flow resistor tubes with series inflatable actuators. We designed and developed these 3D printed resistors based on the pressure drop principle of multiple capillary orifices, which allows a passive control of its sequential activation from a single source of pressure. Our design fits in standard tube connectors, making it easy to adopt it on any other type of actuator with pneumatic inlets. We present its characterization of pressure drop and evaluation of the activation sequence for series and parallel circuits of actuators. Moreover, we present an application for the assistance of postural transition from lying to sitting. We embedded it in a wearable garment robot-suit designed for infants with cerebral palsy. Then, we performed the test with a dummy baby for emulating the upper-body motion control. The results show a sequential motion control of the sitting and lying transitions validating the proposed system for flow control and its application on the robot-suit.
* Copyright IEEE All rights reserved.Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses. IEEE-RAL-RoboSoft-2021, April 12-16. Virtual Conference hosted by Yale, USA
Control Interface for Hands-free Navigation of Standing Mobility Vehicles based on Upper-Body Natural Movements
Aug 03, 2020


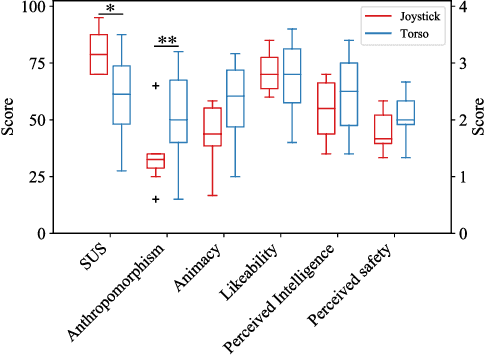
In this paper, we propose and evaluate a novel human-machine interface (HMI) for controlling a standing mobility vehicle or person carrier robot, aiming for a hands-free control through upper-body natural postures derived from gaze tracking while walking. We target users with lower-body impairment with remaining upper-body motion capabilities. The developed HMI bases on a sensing array for capturing body postures; an intent recognition algorithm for continuous mapping of body motions to robot control space; and a personalizing system for multiple body sizes and shapes. We performed two user studies: first, an analysis of the required body muscles involved in navigating with the proposed control; and second, an assessment of the HMI compared with a standard joystick through quantitative and qualitative metrics in a narrow circuit task. We concluded that the main user control contribution comes from Rectus Abdominis and Erector Spinae muscle groups at different levels. Finally, the comparative study showed that a joystick still outperforms the proposed HMI in usability perceptions and controllability metrics, however, the smoothness of user control was similar in jerk and fluency. Moreover, users' perceptions showed that hands-free control made it more anthropomorphic, animated, and even safer.
* 2020 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses