 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl Interface for Hands-free Navigation of Standing Mobility Vehicles based on Upper-Body Natural Movements
Paper and Code
Aug 03, 2020


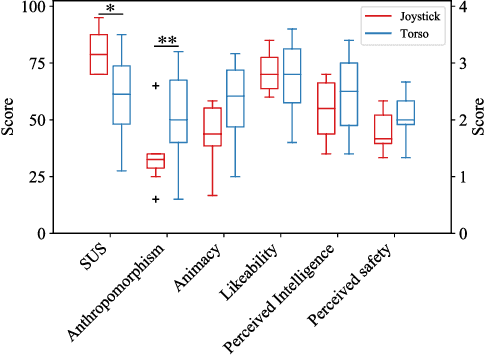
In this paper, we propose and evaluate a novel human-machine interface (HMI) for controlling a standing mobility vehicle or person carrier robot, aiming for a hands-free control through upper-body natural postures derived from gaze tracking while walking. We target users with lower-body impairment with remaining upper-body motion capabilities. The developed HMI bases on a sensing array for capturing body postures; an intent recognition algorithm for continuous mapping of body motions to robot control space; and a personalizing system for multiple body sizes and shapes. We performed two user studies: first, an analysis of the required body muscles involved in navigating with the proposed control; and second, an assessment of the HMI compared with a standard joystick through quantitative and qualitative metrics in a narrow circuit task. We concluded that the main user control contribution comes from Rectus Abdominis and Erector Spinae muscle groups at different levels. Finally, the comparative study showed that a joystick still outperforms the proposed HMI in usability perceptions and controllability metrics, however, the smoothness of user control was similar in jerk and fluency. Moreover, users' perceptions showed that hands-free control made it more anthropomorphic, animated, and even safer.