 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEffect of Model Merging in Domain-Specific Ad-hoc Retrieval
Sep 26, 2025In this study, we evaluate the effect of model merging in ad-hoc retrieval tasks. Model merging is a technique that combines the diverse characteristics of multiple models. We hypothesized that applying model merging to domain-specific ad-hoc retrieval tasks could improve retrieval effectiveness. To verify this hypothesis, we merged the weights of a source retrieval model and a domain-specific (non-retrieval) model using a linear interpolation approach. A key advantage of our approach is that it requires no additional fine-tuning of the models. We conducted two experiments each in the medical and Japanese domains. The first compared the merged model with the source retrieval model, and the second compared it with a LoRA fine-tuned model under both full and limited data settings for model construction. The experimental results indicate that model merging has the potential to produce more effective domain-specific retrieval models than the source retrieval model, and may serve as a practical alternative to LoRA fine-tuning, particularly when only a limited amount of data is available.
Passive Flow Control for Series Inflatable Actuators: Application on a Wearable Soft-Robot for Posture Assistance
Mar 09, 2021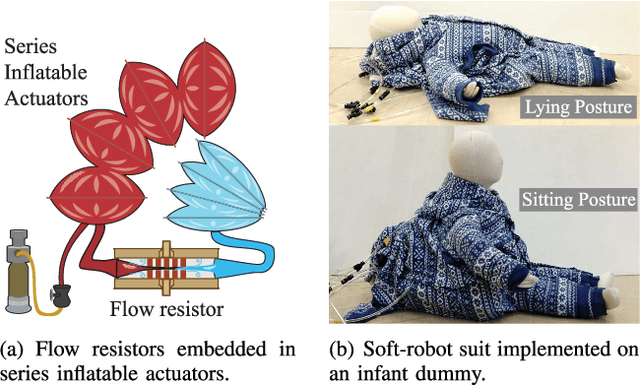
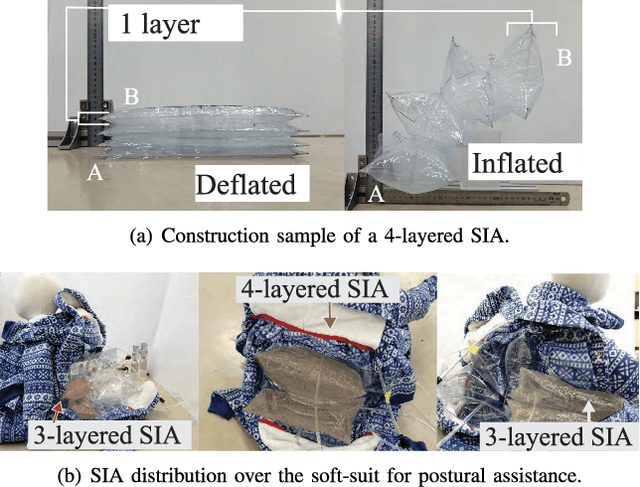
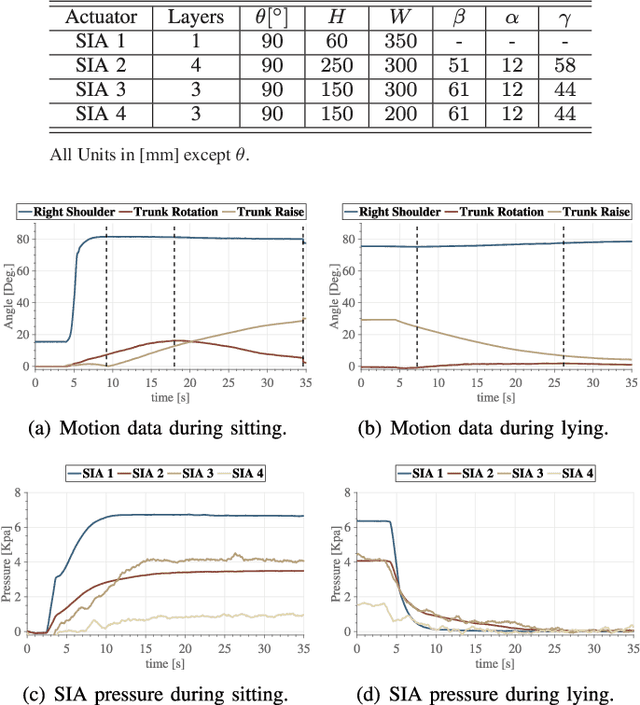

This paper presents a passive control method for multiple degrees of freedom in a soft pneumatic robot through the combination of flow resistor tubes with series inflatable actuators. We designed and developed these 3D printed resistors based on the pressure drop principle of multiple capillary orifices, which allows a passive control of its sequential activation from a single source of pressure. Our design fits in standard tube connectors, making it easy to adopt it on any other type of actuator with pneumatic inlets. We present its characterization of pressure drop and evaluation of the activation sequence for series and parallel circuits of actuators. Moreover, we present an application for the assistance of postural transition from lying to sitting. We embedded it in a wearable garment robot-suit designed for infants with cerebral palsy. Then, we performed the test with a dummy baby for emulating the upper-body motion control. The results show a sequential motion control of the sitting and lying transitions validating the proposed system for flow control and its application on the robot-suit.
* Copyright IEEE All rights reserved.Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses. IEEE-RAL-RoboSoft-2021, April 12-16. Virtual Conference hosted by Yale, USA