 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOMEGA: A Low-Latency GNN Serving System for Large Graphs
Jan 15, 2025



Graph Neural Networks (GNNs) have been widely adopted for their ability to compute expressive node representations in graph datasets. However, serving GNNs on large graphs is challenging due to the high communication, computation, and memory overheads of constructing and executing computation graphs, which represent information flow across large neighborhoods. Existing approximation techniques in training can mitigate the overheads but, in serving, still lead to high latency and/or accuracy loss. To this end, we propose OMEGA, a system that enables low-latency GNN serving for large graphs with minimal accuracy loss through two key ideas. First, OMEGA employs selective recomputation of precomputed embeddings, which allows for reusing precomputed computation subgraphs while selectively recomputing a small fraction to minimize accuracy loss. Second, we develop computation graph parallelism, which reduces communication overhead by parallelizing the creation and execution of computation graphs across machines. Our evaluation with large graph datasets and GNN models shows that OMEGA significantly outperforms state-of-the-art techniques.
Efficient Placard Discovery for Semantic Mapping During Frontier Exploration
Oct 27, 2021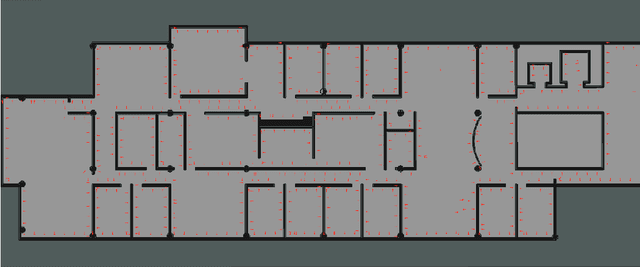
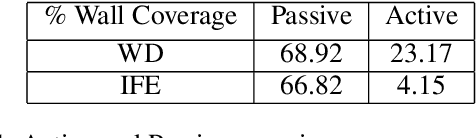
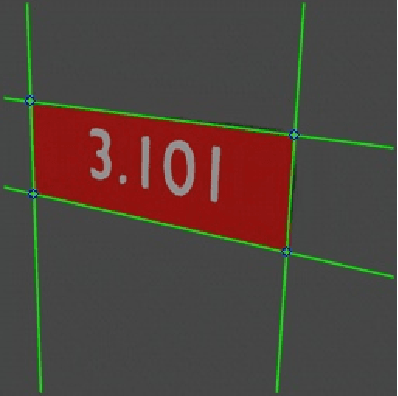
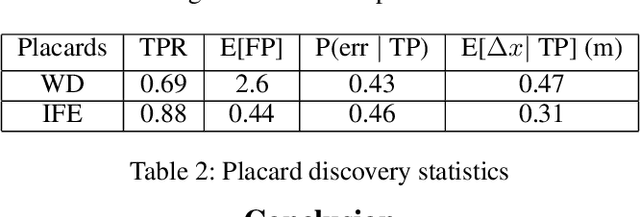
Semantic mapping is the task of providing a robot with a map of its environment beyond the open, navigable space of traditional Simultaneous Localization and Mapping (SLAM) algorithms by attaching semantics to locations. The system presented in this work reads door placards to annotate the locations of offices. Whereas prior work on this system developed hand-crafted detectors, this system leverages YOLOv2 for detection and a segmentation network for segmentation. Placards are localized by computing their pose from a homography computed from a segmented quadrilateral outline. This work also introduces an Interruptable Frontier Exploration algorithm, enabling the robot to explore its environment to construct its SLAM map while pausing to inspect placards observed during this process. This allows the robot to autonomously discover room placards without human intervention while speeding up significantly over previous autonomous exploration methods.