 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobal Optimization of Stochastic Black-Box Functions with Arbitrary Noise Distributions using Wilson Score Kernel Density Estimation
Sep 11, 2025Many optimization problems in robotics involve the optimization of time-expensive black-box functions, such as those involving complex simulations or evaluation of real-world experiments. Furthermore, these functions are often stochastic as repeated experiments are subject to unmeasurable disturbances. Bayesian optimization can be used to optimize such methods in an efficient manner by deploying a probabilistic function estimator to estimate with a given confidence so that regions of the search space can be pruned away. Consequently, the success of the Bayesian optimization depends on the function estimator's ability to provide informative confidence bounds. Existing function estimators require many function evaluations to infer the underlying confidence or depend on modeling of the disturbances. In this paper, it is shown that the confidence bounds provided by the Wilson Score Kernel Density Estimator (WS-KDE) are applicable as excellent bounds to any stochastic function with an output confined to the closed interval [0;1] regardless of the distribution of the output. This finding opens up the use of WS-KDE for stable global optimization on a wider range of cost functions. The properties of WS-KDE in the context of Bayesian optimization are demonstrated in simulation and applied to the problem of automated trap design for vibrational part feeders.
In search of inliers: 3d correspondence by local and global voting
Aug 23, 2017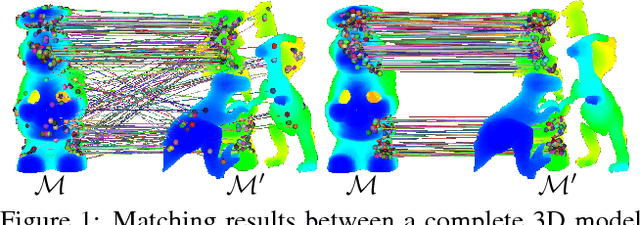
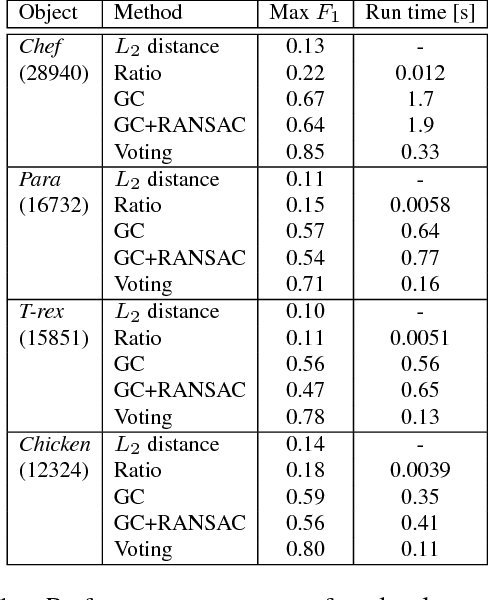
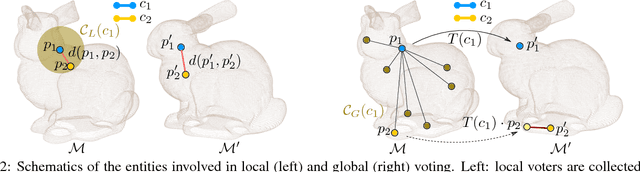
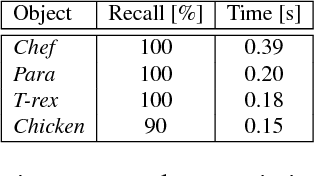
We present a method for finding correspondence between 3D models. From an initial set of feature correspondences, our method uses a fast voting scheme to separate the inliers from the outliers. The novelty of our method lies in the use of a combination of local and global constraints to determine if a vote should be cast. On a local scale, we use simple, low-level geometric invariants. On a global scale, we apply covariant constraints for finding compatible correspondences. We guide the sampling for collecting voters by downward dependencies on previous voting stages. All of this together results in an accurate matching procedure. We evaluate our algorithm by controlled and comparative testing on different datasets, giving superior performance compared to state of the art methods. In a final experiment, we apply our method for 3D object detection, showing potential use of our method within higher-level vision.
Pose Estimation using Local Structure-Specific Shape and Appearance Context
Aug 23, 2017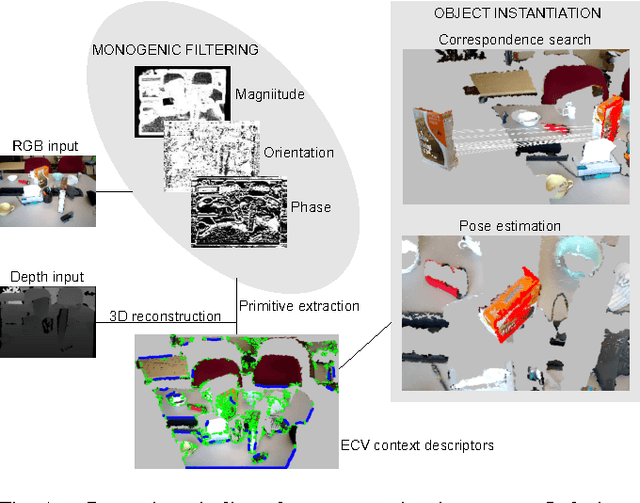

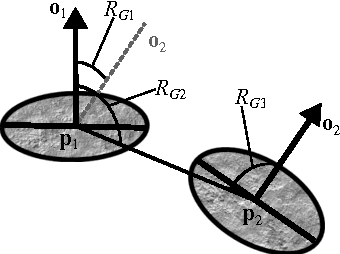
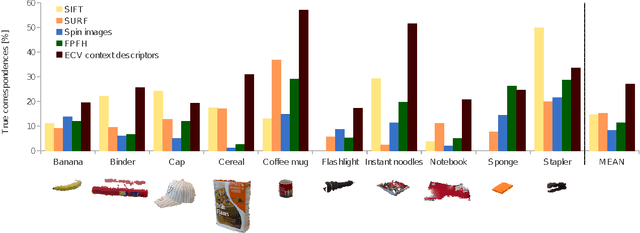
We address the problem of estimating the alignment pose between two models using structure-specific local descriptors. Our descriptors are generated using a combination of 2D image data and 3D contextual shape data, resulting in a set of semi-local descriptors containing rich appearance and shape information for both edge and texture structures. This is achieved by defining feature space relations which describe the neighborhood of a descriptor. By quantitative evaluations, we show that our descriptors provide high discriminative power compared to state of the art approaches. In addition, we show how to utilize this for the estimation of the alignment pose between two point sets. We present experiments both in controlled and real-life scenarios to validate our approach.