 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTalking to Robots: A Practical Examination of Speech Foundation Models for HRI Applications
Aug 25, 2025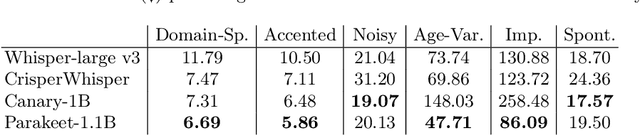
Automatic Speech Recognition (ASR) systems in real-world settings need to handle imperfect audio, often degraded by hardware limitations or environmental noise, while accommodating diverse user groups. In human-robot interaction (HRI), these challenges intersect to create a uniquely challenging recognition environment. We evaluate four state-of-the-art ASR systems on eight publicly available datasets that capture six dimensions of difficulty: domain-specific, accented, noisy, age-variant, impaired, and spontaneous speech. Our analysis demonstrates significant variations in performance, hallucination tendencies, and inherent biases, despite similar scores on standard benchmarks. These limitations have serious implications for HRI, where recognition errors can interfere with task performance, user trust, and safety.
A Framework for Adapting Human-Robot Interaction to Diverse User Groups
Oct 15, 2024



To facilitate natural and intuitive interactions with diverse user groups in real-world settings, social robots must be capable of addressing the varying requirements and expectations of these groups while adapting their behavior based on user feedback. While previous research often focuses on specific demographics, we present a novel framework for adaptive Human-Robot Interaction (HRI) that tailors interactions to different user groups and enables individual users to modulate interactions through both minor and major interruptions. Our primary contributions include the development of an adaptive, ROS-based HRI framework with an open-source code base. This framework supports natural interactions through advanced speech recognition and voice activity detection, and leverages a large language model (LLM) as a dialogue bridge. We validate the efficiency of our framework through module tests and system trials, demonstrating its high accuracy in age recognition and its robustness to repeated user inputs and plan changes.