 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFMimic: Foundation Models are Fine-grained Action Learners from Human Videos
Jul 28, 2025Visual imitation learning (VIL) provides an efficient and intuitive strategy for robotic systems to acquire novel skills. Recent advancements in foundation models, particularly Vision Language Models (VLMs), have demonstrated remarkable capabilities in visual and linguistic reasoning for VIL tasks. Despite this progress, existing approaches primarily utilize these models for learning high-level plans from human demonstrations, relying on pre-defined motion primitives for executing physical interactions, which remains a major bottleneck for robotic systems. In this work, we present FMimic, a novel paradigm that harnesses foundation models to directly learn generalizable skills at even fine-grained action levels, using only a limited number of human videos. Extensive experiments demonstrate that our FMimic delivers strong performance with a single human video, and significantly outperforms all other methods with five videos. Furthermore, our method exhibits significant improvements of over 39% and 29% in RLBench multi-task experiments and real-world manipulation tasks, respectively, and exceeds baselines by more than 34% in high-precision tasks and 47% in long-horizon tasks.
VLMimic: Vision Language Models are Visual Imitation Learner for Fine-grained Actions
Oct 29, 2024

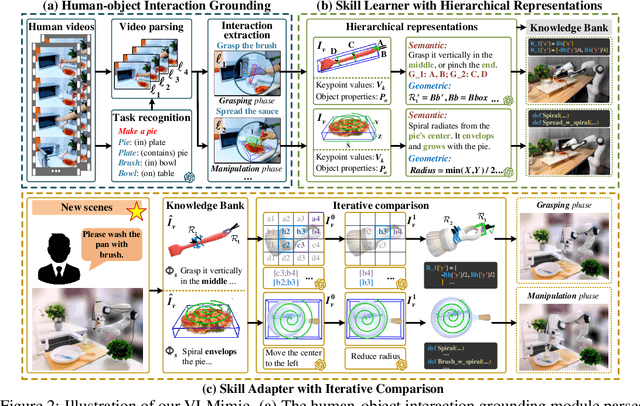

Visual imitation learning (VIL) provides an efficient and intuitive strategy for robotic systems to acquire novel skills. Recent advancements in Vision Language Models (VLMs) have demonstrated remarkable performance in vision and language reasoning capabilities for VIL tasks. Despite the progress, current VIL methods naively employ VLMs to learn high-level plans from human videos, relying on pre-defined motion primitives for executing physical interactions, which remains a major bottleneck. In this work, we present VLMimic, a novel paradigm that harnesses VLMs to directly learn even fine-grained action levels, only given a limited number of human videos. Specifically, VLMimic first grounds object-centric movements from human videos, and learns skills using hierarchical constraint representations, facilitating the derivation of skills with fine-grained action levels from limited human videos. These skills are refined and updated through an iterative comparison strategy, enabling efficient adaptation to unseen environments. Our extensive experiments exhibit that our VLMimic, using only 5 human videos, yields significant improvements of over 27% and 21% in RLBench and real-world manipulation tasks, and surpasses baselines by over 37% in long-horizon tasks.
VIFNet: An End-to-end Visible-Infrared Fusion Network for Image Dehazing
Apr 11, 2024



Image dehazing poses significant challenges in environmental perception. Recent research mainly focus on deep learning-based methods with single modality, while they may result in severe information loss especially in dense-haze scenarios. The infrared image exhibits robustness to the haze, however, existing methods have primarily treated the infrared modality as auxiliary information, failing to fully explore its rich information in dehazing. To address this challenge, the key insight of this study is to design a visible-infrared fusion network for image dehazing. In particular, we propose a multi-scale Deep Structure Feature Extraction (DSFE) module, which incorporates the Channel-Pixel Attention Block (CPAB) to restore more spatial and marginal information within the deep structural features. Additionally, we introduce an inconsistency weighted fusion strategy to merge the two modalities by leveraging the more reliable information. To validate this, we construct a visible-infrared multimodal dataset called AirSim-VID based on the AirSim simulation platform. Extensive experiments performed on challenging real and simulated image datasets demonstrate that VIFNet can outperform many state-of-the-art competing methods. The code and dataset are available at https://github.com/mengyu212/VIFNet_dehazing.