 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOFA-Diffusion Compression: Compressing Diffusion Model in One-Shot Manner
Apr 14, 2026The Diffusion Probabilistic Model (DPM) achieves remarkable performance in image generation, while its increasing parameter size and computational overhead hinder its deployment in practical applications. To improve this, the existing literature focuses on obtaining a smaller model with a fixed architecture through model compression. However, in practice, DPMs usually need to be deployed on various devices with different resource constraints, which leads to multiple compression processes, incurring significant overhead for repeated training. To obviate this, we propose a once-for-all (OFA) compression framework for DPMs that yields different subnetworks with various computations in a one-shot training manner. The existing OFA framework typically involves massive subnetworks with different parameter sizes, while such a huge candidate space slows the optimization. Thus, we propose to restrict the candidate subnetworks with a certain set of parameter sizes, where each size corresponds to a specific subnetwork. Specifically, to construct each subnetwork with a given size, we gradually allocate the maintained channels by their importance. Furthermore, we propose a reweighting strategy to balance the optimization process of different subnetworks. Experimental results show that our approach can produce compressed DPMs for various sizes with significantly lower training overhead while achieving satisfactory performance.
Fragile Reconstruction: Adversarial Vulnerability of Reconstruction-Based Detectors for Diffusion-Generated Images
Apr 14, 2026Recently, detecting AI-generated images produced by diffusion-based models has attracted increasing attention due to their potential threat to safety. Among existing approaches, reconstruction-based methods have emerged as a prominent paradigm for this task. However, we find that such methods exhibit severe security vulnerabilities to adversarial perturbations; that is, by adding imperceptible adversarial perturbations to input images, the detection accuracy of classifiers collapses to near zero. To verify this threat, we present a systematic evaluation of the adversarial robustness of three representative detectors across four diverse generative backbone models. First, we construct adversarial attacks in white-box scenarios, which degrade the performance of all well-trained detectors. Moreover, we find that these attacks demonstrate transferability; specifically, attacks crafted against one detector can be transferred to others, indicating that adversarial attacks on detectors can also be constructed in a black-box setting. Finally, we assess common countermeasures and find that standard defense methods against adversarial attacks provide limited mitigation. We attribute these failures to the low signal-to-noise ratio (SNR) of attacked samples as perceived by the detectors. Overall, our results reveal fundamental security limitations of reconstruction-based detectors and highlight the need to rethink existing detection strategies.
Identifying Influential Actions in Human-Robot Interactions
Mar 09, 2026Human-robot interaction combines robotics, cognitive science, and human factors to study collaborative systems. This paper introduces a method for identifying influential robot actions using transfer entropy, a statistic that measures directed information transfer between time series. TE is effective for capturing complex, nonlinear interactions. We apply this method to analyze how robot actions affect human behavior during a conversation with a remotely controlled robot avatar. By focusing on the impact of proximity, our approach demonstrates TE's capability to identify key actions influencing human responses, highlighting its potential to improve the design and adaptability of robotic systems.
Topology-aware Neural Flux Prediction Guided by Physics
Jun 06, 2025Graph Neural Networks (GNNs) often struggle in preserving high-frequency components of nodal signals when dealing with directed graphs. Such components are crucial for modeling flow dynamics, without which a traditional GNN tends to treat a graph with forward and reverse topologies equal.To make GNNs sensitive to those high-frequency components thereby being capable to capture detailed topological differences, this paper proposes a novel framework that combines 1) explicit difference matrices that model directional gradients and 2) implicit physical constraints that enforce messages passing within GNNs to be consistent with natural laws. Evaluations on two real-world directed graph data, namely, water flux network and urban traffic flow network, demonstrate the effectiveness of our proposal.
Transfer Operator Learning with Fusion Frame
Aug 20, 2024



The challenge of applying learned knowledge from one domain to solve problems in another related but distinct domain, known as transfer learning, is fundamental in operator learning models that solve Partial Differential Equations (PDEs). These current models often struggle with generalization across different tasks and datasets, limiting their applicability in diverse scientific and engineering disciplines. This work presents a novel framework that enhances the transfer learning capabilities of operator learning models for solving Partial Differential Equations (PDEs) through the integration of fusion frame theory with the Proper Orthogonal Decomposition (POD)-enhanced Deep Operator Network (DeepONet). We introduce an innovative architecture that combines fusion frames with POD-DeepONet, demonstrating superior performance across various PDEs in our experimental analysis. Our framework addresses the critical challenge of transfer learning in operator learning models, paving the way for adaptable and efficient solutions across a wide range of scientific and engineering applications.
Fredholm Integral Equations Neural Operator (FIE-NO) for Data-Driven Boundary Value Problems
Aug 20, 2024



In this paper, we present a novel Fredholm Integral Equation Neural Operator (FIE-NO) method, an integration of Random Fourier Features and Fredholm Integral Equations (FIE) into the deep learning framework, tailored for solving data-driven Boundary Value Problems (BVPs) with irregular boundaries. Unlike traditional computational approaches that struggle with the computational intensity and complexity of such problems, our method offers a robust, efficient, and accurate solution mechanism, using a physics inspired design of the learning structure. We demonstrate that the proposed physics-guided operator learning method (FIE-NO) achieves superior performance in addressing BVPs. Notably, our approach can generalize across multiple scenarios, including those with unknown equation forms and intricate boundary shapes, after being trained only on one boundary condition. Experimental validation demonstrates that the FIE-NO method performs well in simulated examples, including Darcy flow equation and typical partial differential equations such as the Laplace and Helmholtz equations. The proposed method exhibits robust performance across different boundary conditions. Experimental results indicate that FIE-NO achieves higher accuracy and stability compared to other methods when addressing complex boundary value problems with varying numbers of interior points.
Model-free Legibility: Enhancing Human-Robot Interactions through Implicit Communication and Influence Modulation
Jun 18, 2024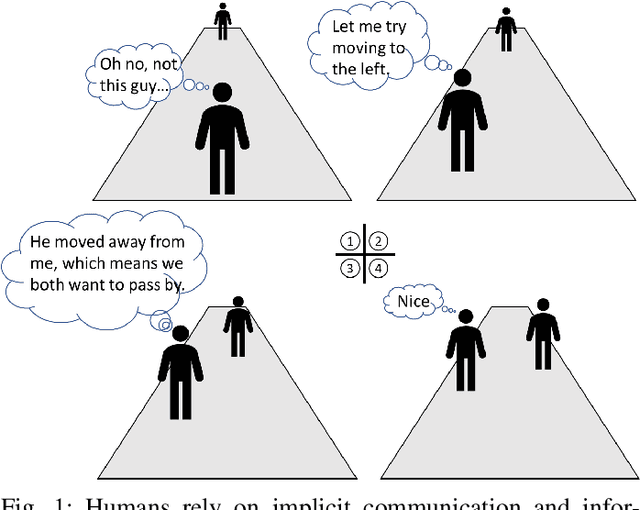
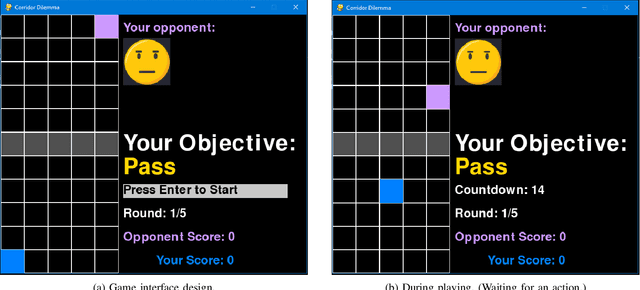
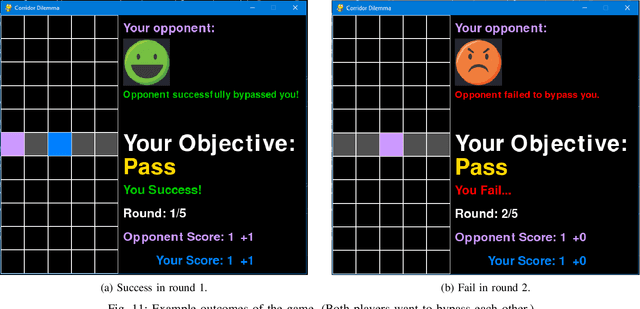
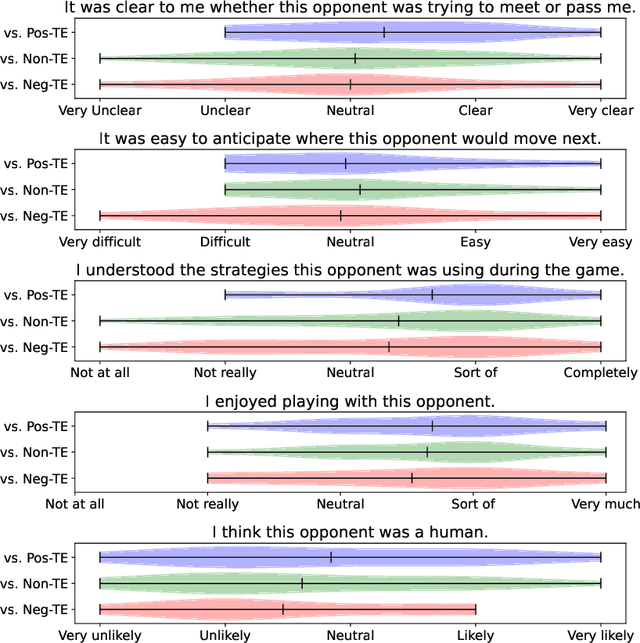
Communication is essential for successful interaction. In human-robot interaction, implicit communication enhances robots' understanding of human needs, emotions, and intentions. This paper introduces a method to foster implicit communication in HRI without explicitly modeling human intentions or relying on pre-existing knowledge. Leveraging Transfer Entropy, we modulate influence between agents in social interactions in scenarios involving either collaboration or competition. By integrating influence into agents' rewards within a partially observable Markov decision process, we demonstrate that boosting influence enhances collaboration or competition performance, while resisting influence diminishes performance. Our findings are validated through simulations and real-world experiments with human participants.
Social Cue Analysis using Transfer Entropy
Mar 06, 2023



Robots that work close to humans need to understand and use social cues to act in a socially acceptable manner. Social cues are a form of communication (i.e., information flow) between people. In this paper, a framework is introduced to detect and analyse social cues and information transfer directionality using an information-theoretic measure, namely, transfer entropy. We demonstrate the framework in three settings involving social interactions between humans: object-handover, group-joining and person-following. Results show that transfer entropy can identify information flows between agents, when and where they occur, and their relative strength. For instance, in a person-following scenario, we find that head orientation of a predictor is particularly informative, and the different times and locations that this is used to convey information to a leader influences their behaviour. Potential applications of the framework include information flow or social cue analysis for interactive robot design, or socially-aware robot planning.