 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring human-SAV interaction using large language models: The impact of psychological ownership and anthropomorphism on user experience
Apr 23, 2025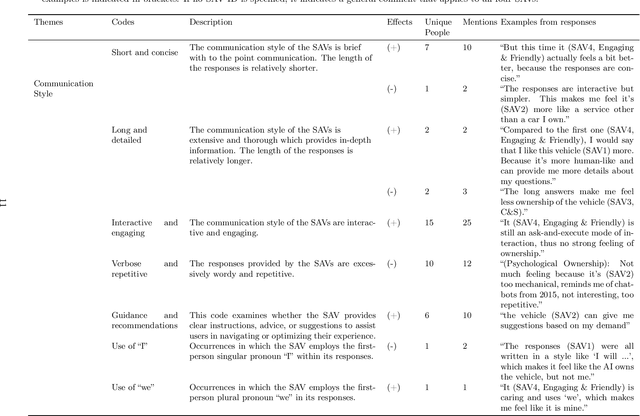
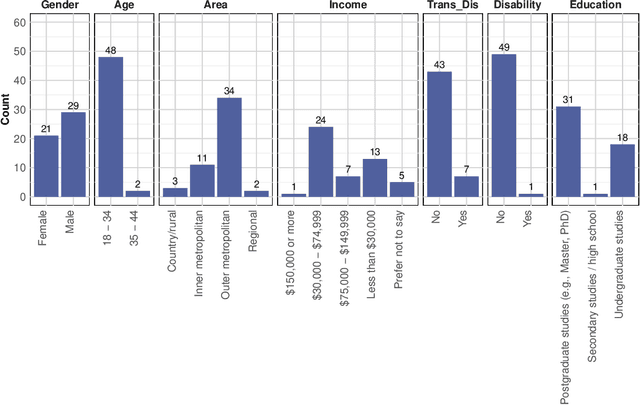

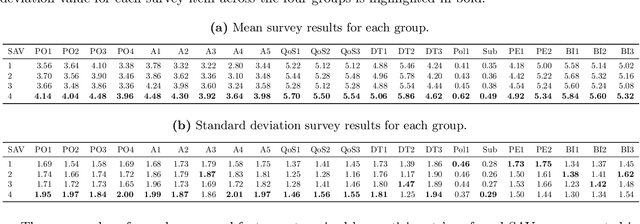
There has been extensive prior work exploring how psychological factors such as anthropomorphism affect the adoption of shared autonomous vehicles (SAVs). However, limited research has been conducted on how prompt strategies in large language model (LLM)-powered SAV User Interfaces (UIs) affect users' perceptions, experiences, and intentions to adopt such technology. In this work, we investigate how conversational UIs powered by LLMs drive these psychological factors and psychological ownership, the sense of possession a user may come to feel towards an entity or object they may not legally own. We designed four SAV UIs with varying levels of anthropomorphic characteristics and psychological ownership triggers. Quantitative measures of psychological ownership, anthropomorphism, quality of service, disclosure tendency, sentiment of SAV responses, and overall acceptance were collected after participants interacted with each SAV. Qualitative feedback was also gathered regarding the experience of psychological ownership during the interactions. The results indicate that an SAV conversational UI designed to be more anthropomorphic and to induce psychological ownership improved users' perceptions of the SAV's human-like qualities and improved the sentiment of responses compared to a control condition. These findings provide practical guidance for designing LLM-based conversational UIs that enhance user experience and adoption of SAVs.
Model-free Legibility: Enhancing Human-Robot Interactions through Implicit Communication and Influence Modulation
Jun 18, 2024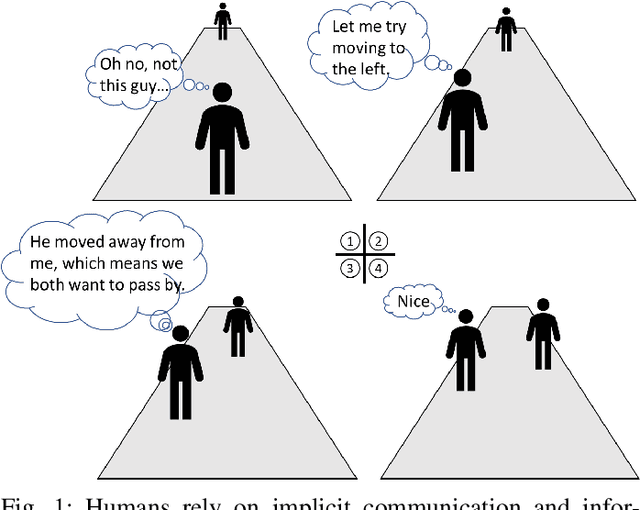
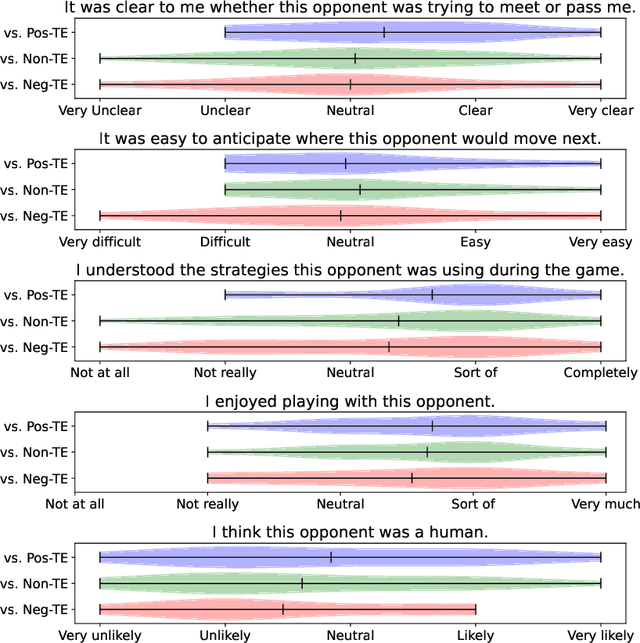
Communication is essential for successful interaction. In human-robot interaction, implicit communication enhances robots' understanding of human needs, emotions, and intentions. This paper introduces a method to foster implicit communication in HRI without explicitly modeling human intentions or relying on pre-existing knowledge. Leveraging Transfer Entropy, we modulate influence between agents in social interactions in scenarios involving either collaboration or competition. By integrating influence into agents' rewards within a partially observable Markov decision process, we demonstrate that boosting influence enhances collaboration or competition performance, while resisting influence diminishes performance. Our findings are validated through simulations and real-world experiments with human participants.