 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-free Legibility: Enhancing Human-Robot Interactions through Implicit Communication and Influence Modulation
Paper and Code
Jun 18, 2024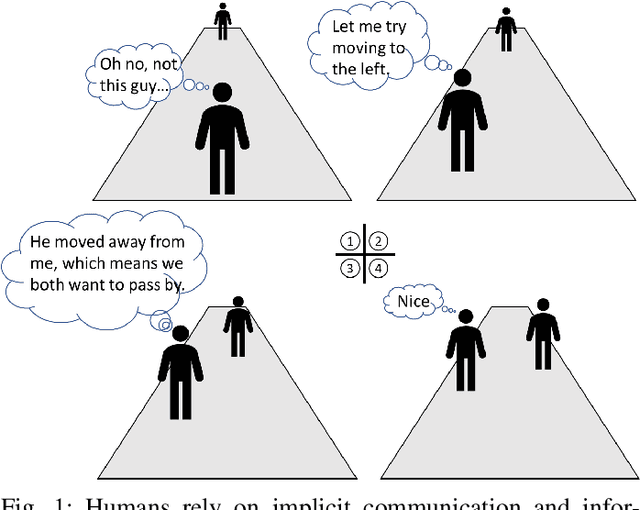
Communication is essential for successful interaction. In human-robot interaction, implicit communication enhances robots' understanding of human needs, emotions, and intentions. This paper introduces a method to foster implicit communication in HRI without explicitly modeling human intentions or relying on pre-existing knowledge. Leveraging Transfer Entropy, we modulate influence between agents in social interactions in scenarios involving either collaboration or competition. By integrating influence into agents' rewards within a partially observable Markov decision process, we demonstrate that boosting influence enhances collaboration or competition performance, while resisting influence diminishes performance. Our findings are validated through simulations and real-world experiments with human participants.