 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTimestep-Aware Block Masking for Efficient Diffusion Model Inference
Mar 20, 2026Diffusion Probabilistic Models (DPMs) have achieved great success in image generation but suffer from high inference latency due to their iterative denoising nature. Motivated by the evolving feature dynamics across the denoising trajectory, we propose a novel framework to optimize the computational graph of pre-trained DPMs on a per-timestep basis. By learning timestep-specific masks, our method dynamically determines which blocks to execute or bypass through feature reuse at each inference stage. Unlike global optimization methods that incur prohibitive memory costs via full-chain backpropagation, our method optimizes masks for each timestep independently, ensuring a memory-efficient training process. To guide this process, we introduce a timestep-aware loss scaling mechanism that prioritizes feature fidelity during sensitive denoising phases, complemented by a knowledge-guided mask rectification strategy to prune redundant spatial-temporal dependencies. Our approach is architecture-agnostic and demonstrates significant efficiency gains across a broad spectrum of models, including DDPM, LDM, DiT, and PixArt. Experimental results show that by treating the denoising process as a sequence of optimized computational paths, our method achieves a superior balance between sampling speed and generative quality. Our code will be released.
TEXTS-Diff: TEXTS-Aware Diffusion Model for Real-World Text Image Super-Resolution
Jan 24, 2026Real-world text image super-resolution aims to restore overall visual quality and text legibility in images suffering from diverse degradations and text distortions. However, the scarcity of text image data in existing datasets results in poor performance on text regions. In addition, datasets consisting of isolated text samples limit the quality of background reconstruction. To address these limitations, we construct Real-Texts, a large-scale, high-quality dataset collected from real-world images, which covers diverse scenarios and contains natural text instances in both Chinese and English. Additionally, we propose the TEXTS-Aware Diffusion Model (TEXTS-Diff) to achieve high-quality generation in both background and textual regions. This approach leverages abstract concepts to improve the understanding of textual elements within visual scenes and concrete text regions to enhance textual details. It mitigates distortions and hallucination artifacts commonly observed in text regions, while preserving high-quality visual scene fidelity. Extensive experiments demonstrate that our method achieves state-of-the-art performance across multiple evaluation metrics, exhibiting superior generalization ability and text restoration accuracy in complex scenarios. All the code, model, and dataset will be released.
Robot Crowd Navigation in Dynamic Environment with Offline Reinforcement Learning
Dec 18, 2023Robot crowd navigation has been gaining increasing attention and popularity in various practical applications. In existing research, deep reinforcement learning has been applied to robot crowd navigation by training policies in an online mode. However, this inevitably leads to unsafe exploration, and consequently causes low sampling efficiency during pedestrian-robot interaction. To this end, we propose an offline reinforcement learning based robot crowd navigation algorithm by utilizing pre-collected crowd navigation experience. Specifically, this algorithm integrates a spatial-temporal state into implicit Q-Learning to avoid querying out-of-distribution robot actions of the pre-collected experience, while capturing spatial-temporal features from the offline pedestrian-robot interactions. Experimental results demonstrate that the proposed algorithm outperforms the state-of-the-art methods by means of qualitative and quantitative analysis.
On the Robustness of Object Detection Models in Aerial Images
Aug 29, 2023
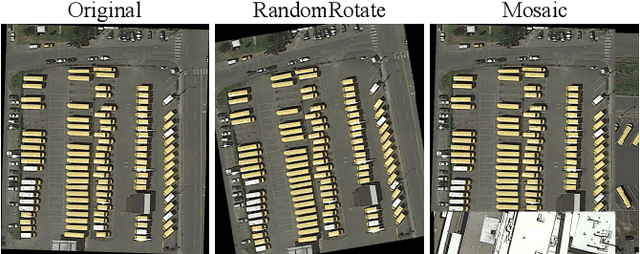


The robustness of object detection models is a major concern when applied to real-world scenarios. However, the performance of most object detection models degrades when applied to images subjected to corruptions, since they are usually trained and evaluated on clean datasets. Enhancing the robustness of object detection models is of utmost importance, especially for those designed for aerial images, which feature complex backgrounds, substantial variations in scales and orientations of objects. This paper addresses the challenge of assessing the robustness of object detection models in aerial images, with a specific emphasis on scenarios where images are affected by clouds. In this study, we introduce two novel benchmarks based on DOTA-v1.0. The first benchmark encompasses 19 prevalent corruptions, while the second focuses on cloud-corrupted images-a phenomenon uncommon in natural pictures yet frequent in aerial photography. We systematically evaluate the robustness of mainstream object detection models and perform numerous ablation experiments. Through our investigations, we find that enhanced model architectures, larger networks, well-crafted modules, and judicious data augmentation strategies collectively enhance the robustness of aerial object detection models. The benchmarks we propose and our comprehensive experimental analyses can facilitate research on robust object detection in aerial images. Codes and datasets are available at: (https://github.com/hehaodong530/DOTA-C)
Spatio-Temporal Transformer-Based Reinforcement Learning for Robot Crowd Navigation
May 26, 2023



The social robot navigation is an open and challenging problem. In existing work, separate modules are used to capture spatial and temporal features, respectively. However, such methods lead to extra difficulties in improving the utilization of spatio-temporal features and reducing the conservative nature of navigation policy. In light of this, we present a spatio-temporal transformer-based policy optimization algorithm to enhance the utilization of spatio-temporal features, thereby facilitating the capture of human-robot interactions. Specifically, this paper introduces a gated embedding mechanism that effectively aligns the spatial and temporal representations by integrating both modalities at the feature level. Then Transformer is leveraged to encode the spatio-temporal semantic information, with hope of finding the optimal navigation policy. Finally, a combination of spatio-temporal Transformer and self-adjusting policy entropy significantly reduces the conservatism of navigation policies. Experimental results demonstrate the effectiveness of the proposed framework, where our method shows superior performance.