 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeRF-In: Free-Form NeRF Inpainting with RGB-D Priors
Jun 10, 2022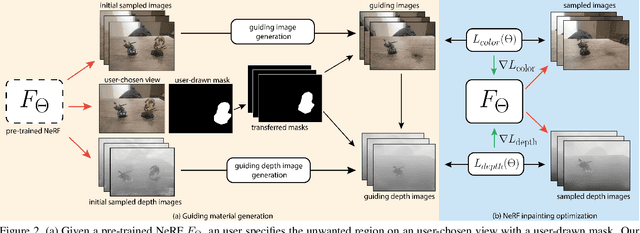
Though Neural Radiance Field (NeRF) demonstrates compelling novel view synthesis results, it is still unintuitive to edit a pre-trained NeRF because the neural network's parameters and the scene geometry/appearance are often not explicitly associated. In this paper, we introduce the first framework that enables users to remove unwanted objects or retouch undesired regions in a 3D scene represented by a pre-trained NeRF without any category-specific data and training. The user first draws a free-form mask to specify a region containing unwanted objects over a rendered view from the pre-trained NeRF. Our framework first transfers the user-provided mask to other rendered views and estimates guiding color and depth images within these transferred masked regions. Next, we formulate an optimization problem that jointly inpaints the image content in all masked regions across multiple views by updating the NeRF model's parameters. We demonstrate our framework on diverse scenes and show it obtained visual plausible and structurally consistent results across multiple views using shorter time and less user manual efforts.
Reducing the Deployment-Time Inference Control Costs of Deep Reinforcement Learning Agents via an Asymmetric Architecture
May 30, 2021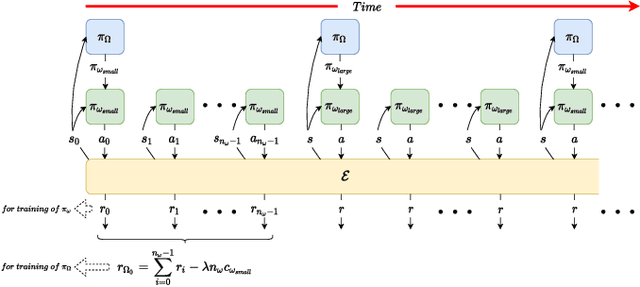
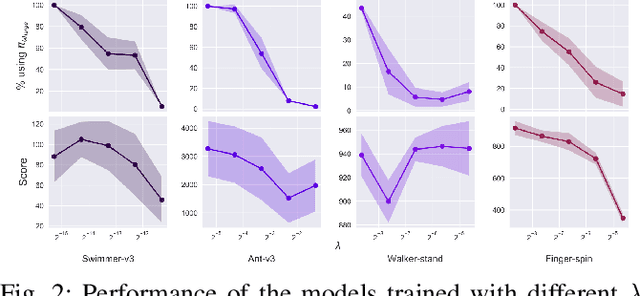
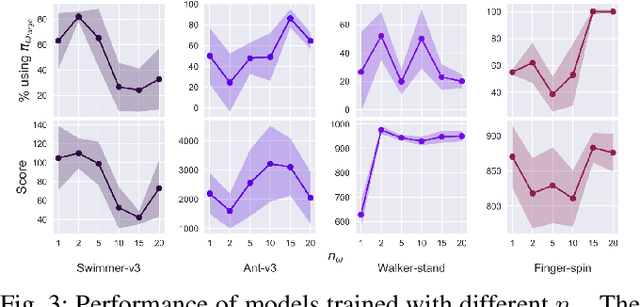
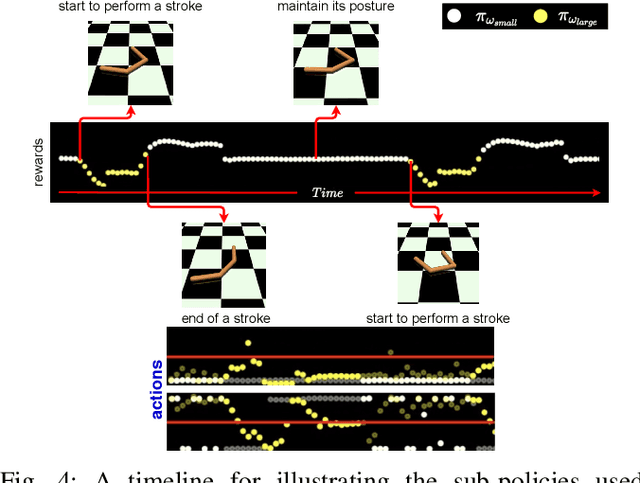
Deep reinforcement learning (DRL) has been demonstrated to provide promising results in several challenging decision making and control tasks. However, the required inference costs of deep neural networks (DNNs) could prevent DRL from being applied to mobile robots which cannot afford high energy-consuming computations. To enable DRL methods to be affordable in such energy-limited platforms, we propose an asymmetric architecture that reduces the overall inference costs via switching between a computationally expensive policy and an economic one. The experimental results evaluated on a number of representative benchmark suites for robotic control tasks demonstrate that our method is able to reduce the inference costs while retaining the agent's overall performance.