 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty Reduction for 3D Point Cloud Self-Supervised Traversability Estimation
Nov 21, 2022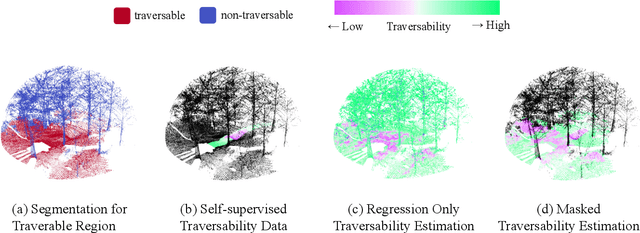
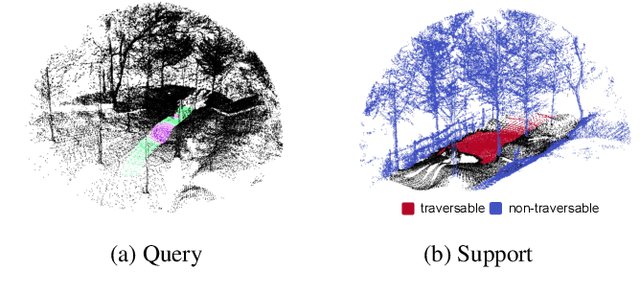

Traversability estimation in off-road environments requires a robust perception system. Recently, approaches to learning a traversability estimation from past vehicle experiences in a self-supervised manner are arising as they can greatly reduce human labeling costs and labeling errors. Nonetheless, the learning setting from self-supervised traversability estimation suffers from congenital uncertainties that appear according to the scarcity of negative information. Negative data are rarely harvested as the system can be severely damaged while logging the data. To mitigate the uncertainty, we introduce a method to incorporate unlabeled data in order to leverage the uncertainty. First, we design a learning architecture that inputs query and support data. Second, unlabeled data are assigned based on the proximity in the metric space. Third, a new metric for uncertainty measures is introduced. We evaluated our approach on our own dataset, `Dtrail', which is composed of a wide variety of negative data.