 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredictability of Performance in Communication Networks Under Markovian Dynamics
Aug 26, 2024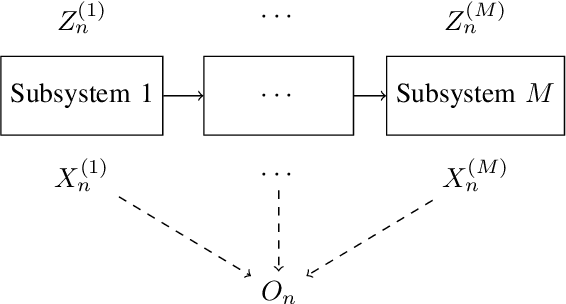
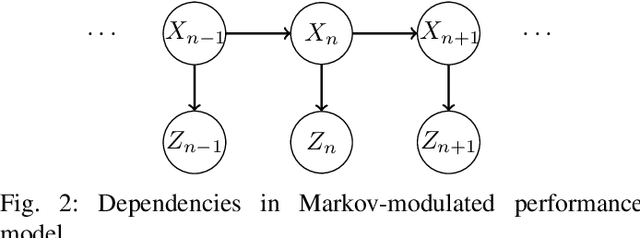
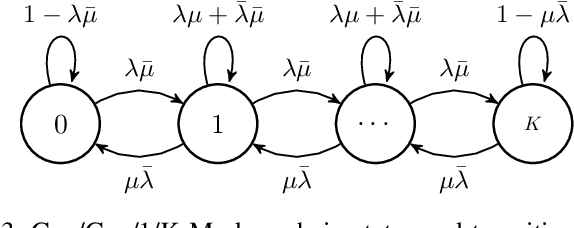
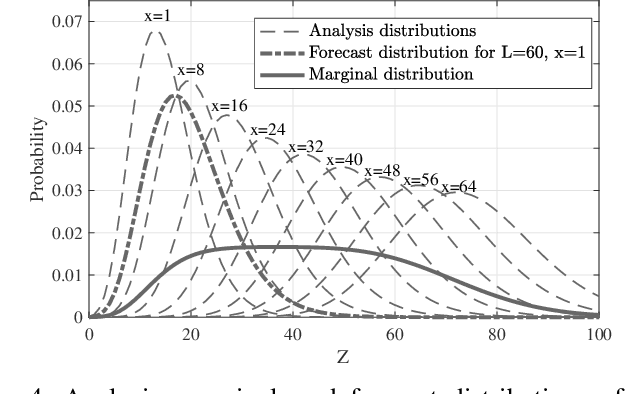
With the emergence of time-critical applications in modern communication networks, there is a growing demand for proactive network adaptation and quality of service (QoS) prediction. However, a fundamental question remains largely unexplored: how can we quantify and achieve more predictable communication systems in terms of performance? To address this gap, this paper introduces a theoretical framework for defining and analyzing predictability in communication systems, with a focus on the impact of observations for performance forecasting. We establish a mathematical definition of predictability based on the total variation distance between forecast and marginal performance distributions. A system is deemed unpredictable when the forecast distribution, providing the most comprehensive characterization of future states using all accessible information, is indistinguishable from the marginal distribution, which depicts the system's behavior without any observational input. This framework is applied to multi-hop systems under Markovian conditions, with a detailed analysis of Geo/Geo/1 queuing models in both single-hop and multi-hop scenarios. We derive exact and approximate expressions for predictability in these systems, as well as upper bounds based on spectral analysis of the underlying Markov chains. Our results have implications for the design of efficient monitoring and prediction mechanisms in future communication networks aiming to provide deterministic services.
Joint UAV Deployment and Resource Allocation in THz-Assisted MEC-Enabled Integrated Space-Air-Ground Networks
Jan 21, 2024Multi-access edge computing (MEC)-enabled integrated space-air-ground (SAG) networks have drawn much attention recently, as they can provide communication and computing services to wireless devices in areas that lack terrestrial base stations (TBSs). Leveraging the ample bandwidth in the terahertz (THz) spectrum, in this paper, we propose MEC-enabled integrated SAG networks with collaboration among unmanned aerial vehicles (UAVs). We then formulate the problem of minimizing the energy consumption of devices and UAVs in the proposed MEC-enabled integrated SAG networks by optimizing tasks offloading decisions, THz sub-bands assignment, transmit power control, and UAVs deployment. The formulated problem is a mixed-integer nonlinear programming (MILP) problem with a non-convex structure, which is challenging to solve. We thus propose a block coordinate descent (BCD) approach to decompose the problem into four sub-problems: 1) device task offloading decision problem, 2) THz sub-band assignment and power control problem, 3) UAV deployment problem, and 4) UAV task offloading decision problem. We then propose to use a matching game, concave-convex procedure (CCP) method, successive convex approximation (SCA), and block successive upper-bound minimization (BSUM) approaches for solving the individual subproblems. Finally, extensive simulations are performed to demonstrate the effectiveness of our proposed algorithm.
Inferring Class Label Distribution of Training Data from Classifiers: An Accuracy-Augmented Meta-Classifier Attack
Nov 08, 2022


Property inference attacks against machine learning (ML) models aim to infer properties of the training data that are unrelated to the primary task of the model, and have so far been formulated as binary decision problems, i.e., whether or not the training data have a certain property. However, in industrial and healthcare applications, the proportion of labels in the training data is quite often also considered sensitive information. In this paper we introduce a new type of property inference attack that unlike binary decision problems in literature, aim at inferring the class label distribution of the training data from parameters of ML classifier models. We propose a method based on \emph{shadow training} and a \emph{meta-classifier} trained on the parameters of the shadow classifiers augmented with the accuracy of the classifiers on auxiliary data. We evaluate the proposed approach for ML classifiers with fully connected neural network architectures. We find that the proposed \emph{meta-classifier} attack provides a maximum relative improvement of $52\%$ over state of the art.
Distributed Algorithms for Feature Extraction Off-loading in Multi-Camera Visual Sensor Networks
May 15, 2017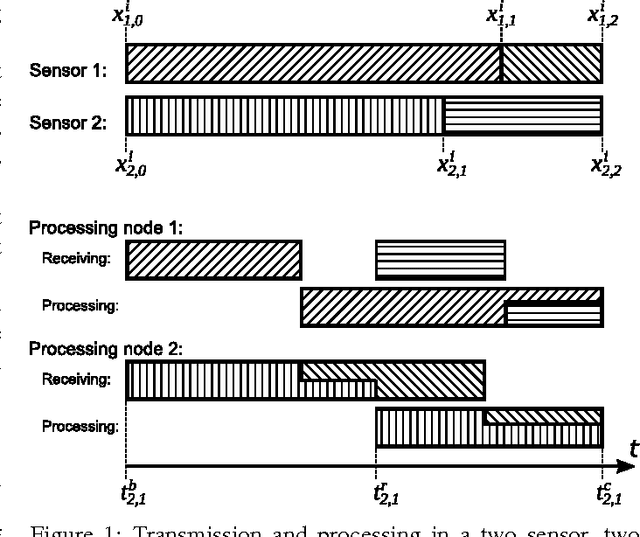
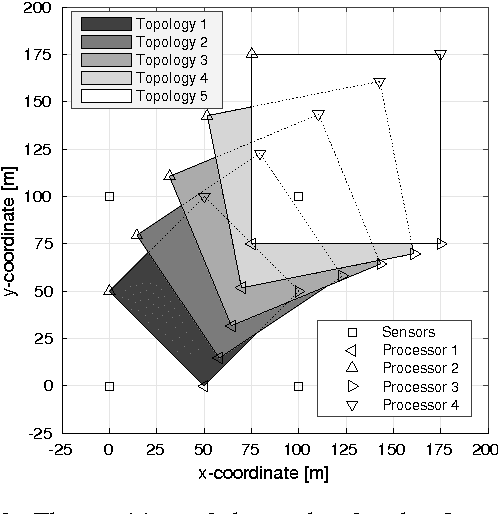
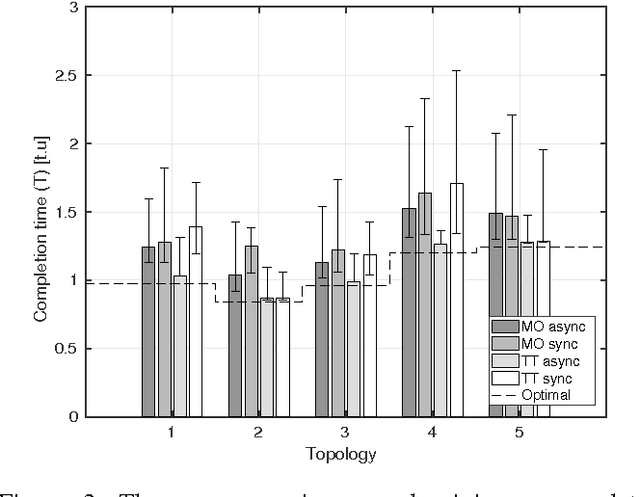
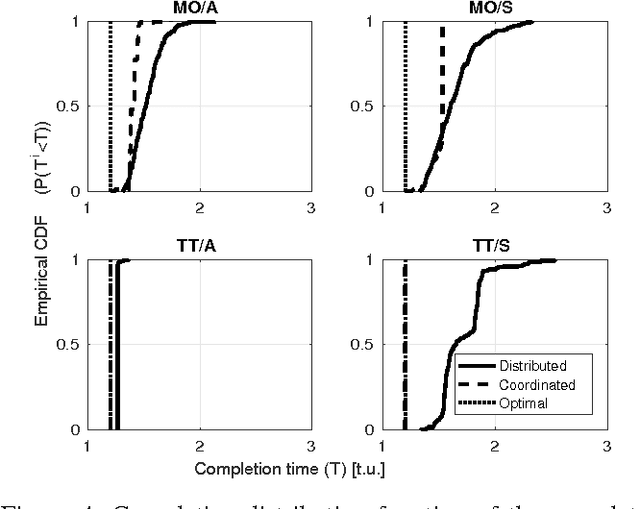
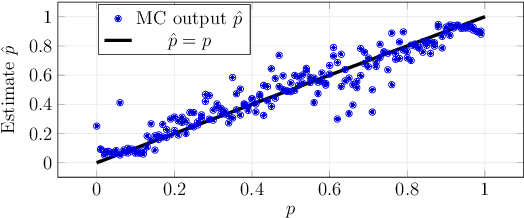
Real-time visual analysis tasks, like tracking and recognition, require swift execution of computationally intensive algorithms. Visual sensor networks can be enabled to perform such tasks by augmenting the sensor network with processing nodes and distributing the computational burden in a way that the cameras contend for the processing nodes while trying to minimize their task completion times. In this paper, we formulate the problem of minimizing the completion time of all camera sensors as an optimization problem. We propose algorithms for fully distributed optimization, analyze the existence of equilibrium allocations, evaluate the effect of the network topology and of the video characteristics, and the benefits of central coordination. Our results demonstrate that with sufficient information available, distributed optimization can provide low completion times, moreover predictable and stable performance can be achieved with additional, sparse central coordination.