 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Algorithms for Feature Extraction Off-loading in Multi-Camera Visual Sensor Networks
May 15, 2017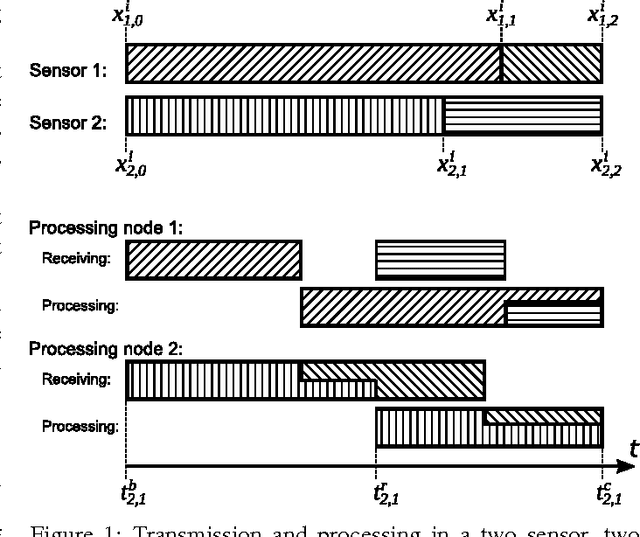
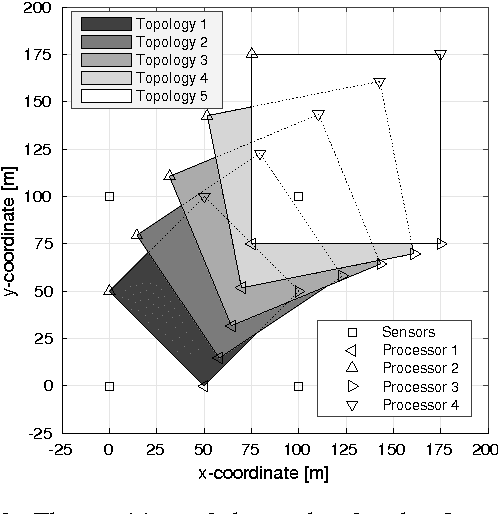
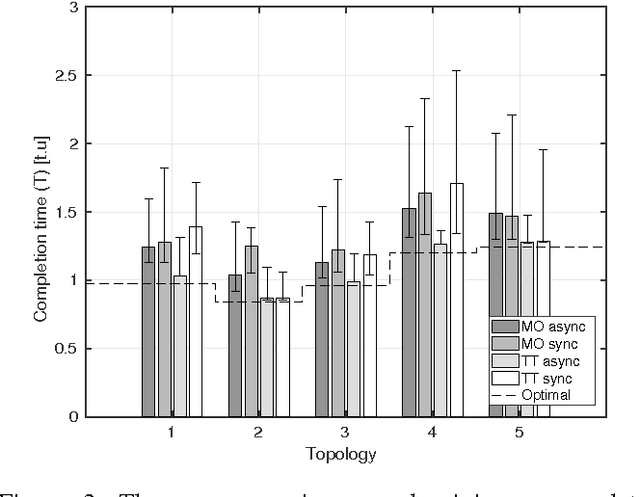
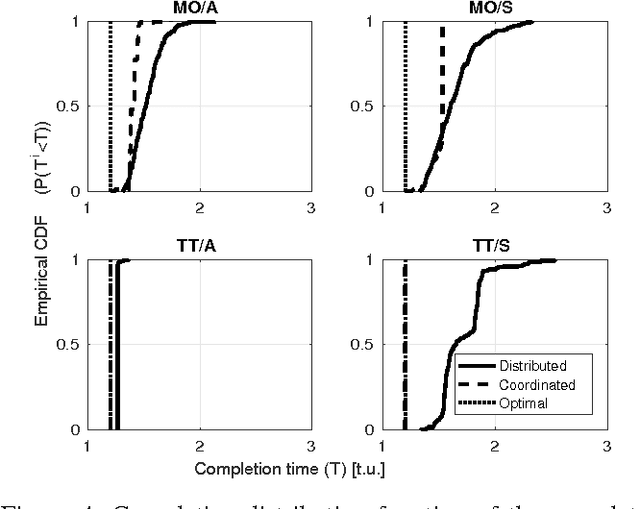
Real-time visual analysis tasks, like tracking and recognition, require swift execution of computationally intensive algorithms. Visual sensor networks can be enabled to perform such tasks by augmenting the sensor network with processing nodes and distributing the computational burden in a way that the cameras contend for the processing nodes while trying to minimize their task completion times. In this paper, we formulate the problem of minimizing the completion time of all camera sensors as an optimization problem. We propose algorithms for fully distributed optimization, analyze the existence of equilibrium allocations, evaluate the effect of the network topology and of the video characteristics, and the benefits of central coordination. Our results demonstrate that with sufficient information available, distributed optimization can provide low completion times, moreover predictable and stable performance can be achieved with additional, sparse central coordination.