 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotif-based Graph Representation Learning with Application to Chemical Molecules
Aug 09, 2022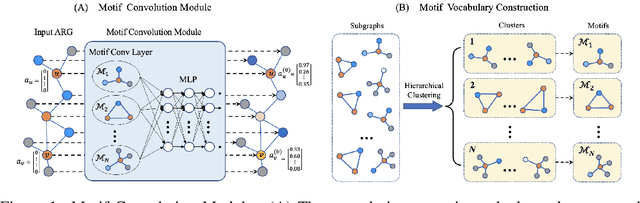

This work considers the task of representation learning on the attributed relational graph (ARG). Both the nodes and edges in an ARG are associated with attributes/features allowing ARGs to encode rich structural information widely observed in real applications. Existing graph neural networks offer limited ability to capture complex interactions within local structural contexts, which hinders them from taking advantage of the expression power of ARGs. We propose Motif Convolution Module (MCM), a new motif-based graph representation learning technique to better utilize local structural information. The ability to handle continuous edge and node features is one of MCM's advantages over existing motif-based models. MCM builds a motif vocabulary in an unsupervised way and deploys a novel motif convolution operation to extract the local structural context of individual nodes, which is then used to learn higher-level node representations via multilayer perceptron and/or message passing in graph neural networks. When compared with other graph learning approaches to classifying synthetic graphs, our approach is substantially better in capturing structural context. We also demonstrate the performance and explainability advantages of our approach by applying it to several molecular benchmarks.
Object-centric Sampling for Fine-grained Image Classification
Dec 10, 2014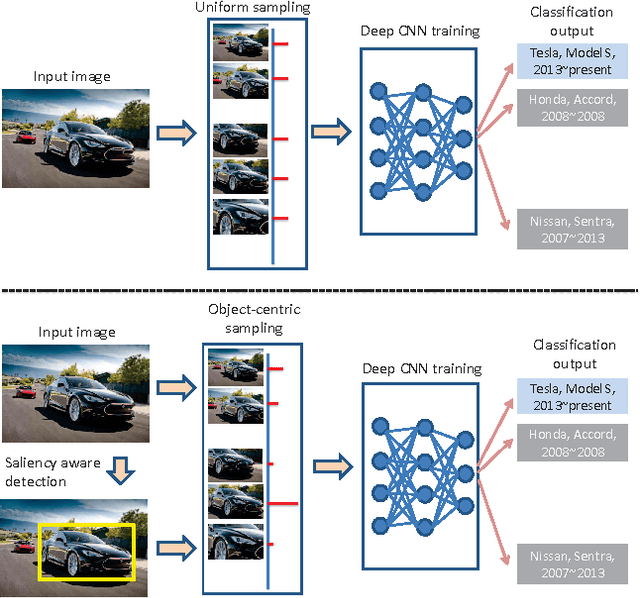
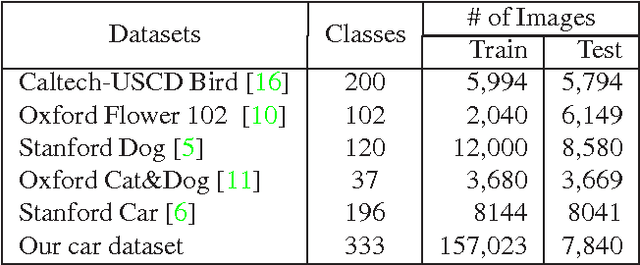

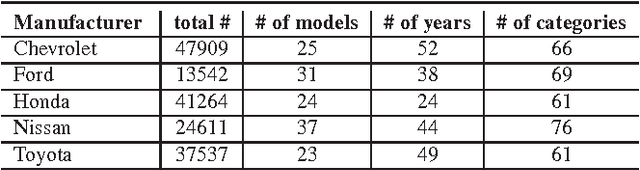
This paper proposes to go beyond the state-of-the-art deep convolutional neural network (CNN) by incorporating the information from object detection, focusing on dealing with fine-grained image classification. Unfortunately, CNN suffers from over-fiting when it is trained on existing fine-grained image classification benchmarks, which typically only consist of less than a few tens of thousands training images. Therefore, we first construct a large-scale fine-grained car recognition dataset that consists of 333 car classes with more than 150 thousand training images. With this large-scale dataset, we are able to build a strong baseline for CNN with top-1 classification accuracy of 81.6%. One major challenge in fine-grained image classification is that many classes are very similar to each other while having large within-class variation. One contributing factor to the within-class variation is cluttered image background. However, the existing CNN training takes uniform window sampling over the image, acting as blind on the location of the object of interest. In contrast, this paper proposes an \emph{object-centric sampling} (OCS) scheme that samples image windows based on the object location information. The challenge in using the location information lies in how to design powerful object detector and how to handle the imperfectness of detection results. To that end, we design a saliency-aware object detection approach specific for the setting of fine-grained image classification, and the uncertainty of detection results are naturally handled in our OCS scheme. Our framework is demonstrated to be very effective, improving top-1 accuracy to 89.3% (from 81.6%) on the large-scale fine-grained car classification dataset.