 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Fourth Monocular Depth Estimation Challenge
Apr 24, 2025


This paper presents the results of the fourth edition of the Monocular Depth Estimation Challenge (MDEC), which focuses on zero-shot generalization to the SYNS-Patches benchmark, a dataset featuring challenging environments in both natural and indoor settings. In this edition, we revised the evaluation protocol to use least-squares alignment with two degrees of freedom to support disparity and affine-invariant predictions. We also revised the baselines and included popular off-the-shelf methods: Depth Anything v2 and Marigold. The challenge received a total of 24 submissions that outperformed the baselines on the test set; 10 of these included a report describing their approach, with most leading methods relying on affine-invariant predictions. The challenge winners improved the 3D F-Score over the previous edition's best result, raising it from 22.58% to 23.05%.
PR-GCN: A Deep Graph Convolutional Network with Point Refinement for 6D Pose Estimation
Aug 23, 2021


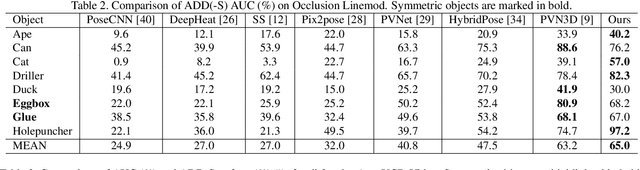
RGB-D based 6D pose estimation has recently achieved remarkable progress, but still suffers from two major limitations: (1) ineffective representation of depth data and (2) insufficient integration of different modalities. This paper proposes a novel deep learning approach, namely Graph Convolutional Network with Point Refinement (PR-GCN), to simultaneously address the issues above in a unified way. It first introduces the Point Refinement Network (PRN) to polish 3D point clouds, recovering missing parts with noise removed. Subsequently, the Multi-Modal Fusion Graph Convolutional Network (MMF-GCN) is presented to strengthen RGB-D combination, which captures geometry-aware inter-modality correlation through local information propagation in the graph convolutional network. Extensive experiments are conducted on three widely used benchmarks, and state-of-the-art performance is reached. Besides, it is also shown that the proposed PRN and MMF-GCN modules are well generalized to other frameworks.