 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Complex Stiffness Human Impedance Model with Customizable Exoskeleton Control
Sep 25, 2020
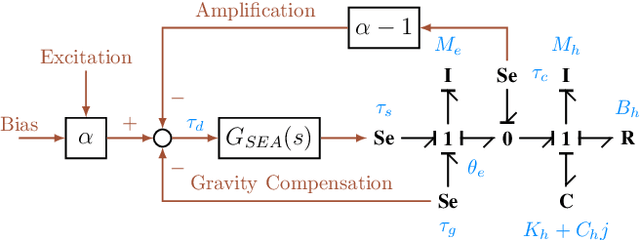

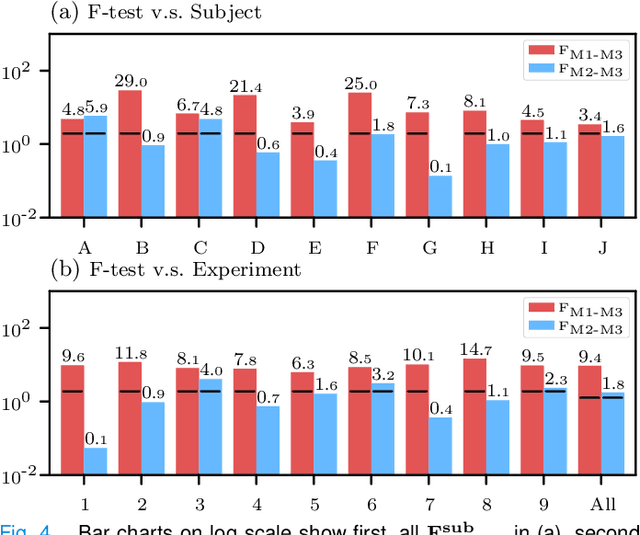
The natural impedance, or dynamic relationship between force and motion, of a human operator can determine the stability of exoskeletons that use interaction-torque feedback to amplify human strength. While human impedance is typically modelled as a linear system, our experiments on a single-joint exoskeleton testbed involving 10 human subjects show evidence of nonlinear behavior: a low-frequency asymptotic phase for the dynamic stiffness of the human that is different than the expected zero, and an unexpectedly consistent damping ratio as the stiffness and inertia vary. To explain these observations, this paper considers a new frequency-domain model of the human joint dynamics featuring complex value stiffness comprising a real stiffness term and a hysteretic damping term. Using a statistical F-test we show that the hysteretic damping term is not only significant but is even more significant than the linear damping term. Further analysis reveals a linear trend linking hysteretic damping and the real part of the stiffness, which allows us to simplify the complex stiffness model down to a 1-parameter system. Then, we introduce and demonstrate a customizable fractional-order controller that exploits this hysteretic damping behavior to improve strength amplification bandwidth while maintaining stability, and explore a tuning approach which ensures that this stability property is robust to muscle co-contraction for each individual.
Complex Stiffness Model of Physical Human-Robot Interaction: Implications for Control of Performance Augmentation Exoskeletons
Mar 06, 2019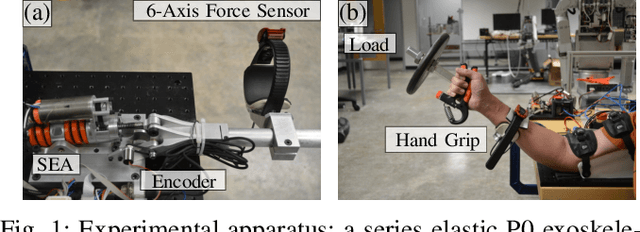
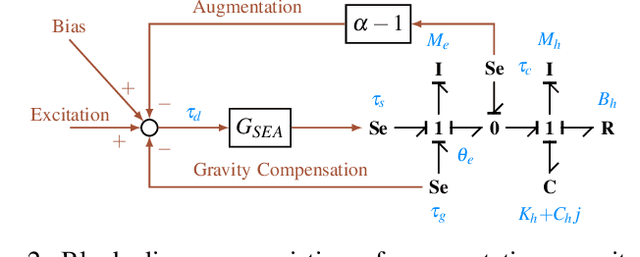
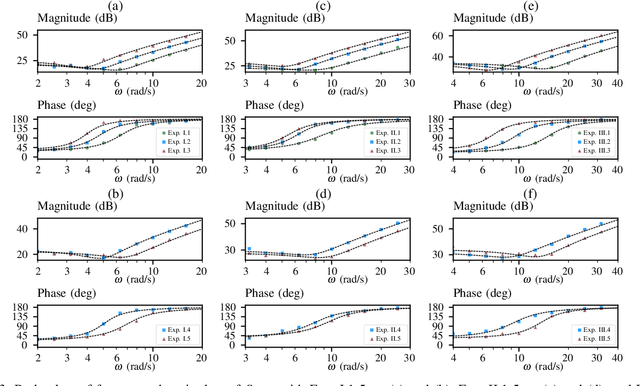
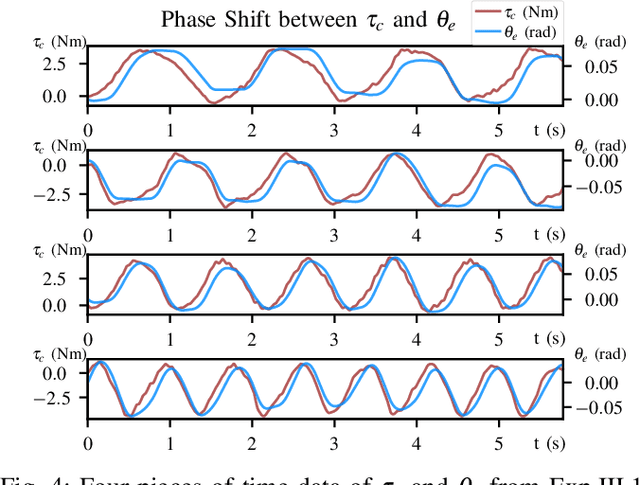
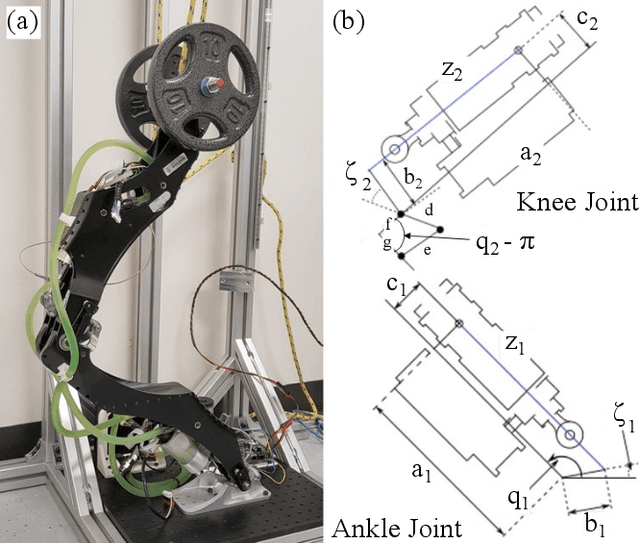
Human joint dynamic stiffness plays an important role in the stability of performance augmentation exoskeletons. In this paper, we consider a new frequency domain model of the human joint dynamics which features a complex value stiffness. This complex stiffness consists of a real stiffness and a hysteretic damping. We use it to explain the dynamic behaviors of the human connected to the exoskeleton, in particular the observed non-zero low frequency phase shift and the near constant damping ratio of the resonant as stiffness and inertia vary. We validate this concept by experimenting with an elbow-joint exoskeleton testbed on a subject while modifying joint stiffness behavior, exoskeleton inertia, and strength augmentation gains. We compare three different models of elbow-joint dynamic stiffness: a model with real stiffness, viscous damping and inertia, a model with complex stiffness and inertia, and a model combining the previous two models. Our results show that the hysteretic damping term improves modeling accuracy, using a statistical F-test. Moreover this improvement is statistically more significant than using classical viscous damping term. In addition, we experimentally observe a linear relationship between the hysteretic damping and the real part of the stiffness which allows us to simplify the complex stiffness model as a 1-parameter system. Ultimately, we design a fractional order controller to demonstrate how human hysteretic damping behavior can be exploited to improve strength amplification performance while maintaining stability.
Exploiting the Natural Dynamics of Series Elastic Robots by Actuator-Centered Sequential Linear Programming
Jul 17, 2018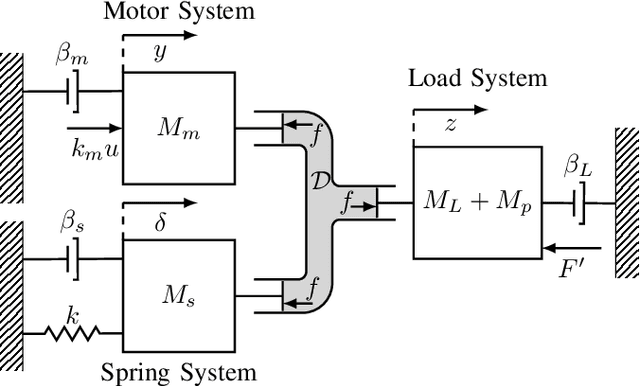
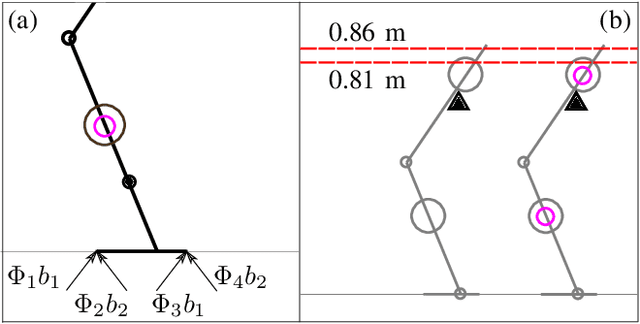
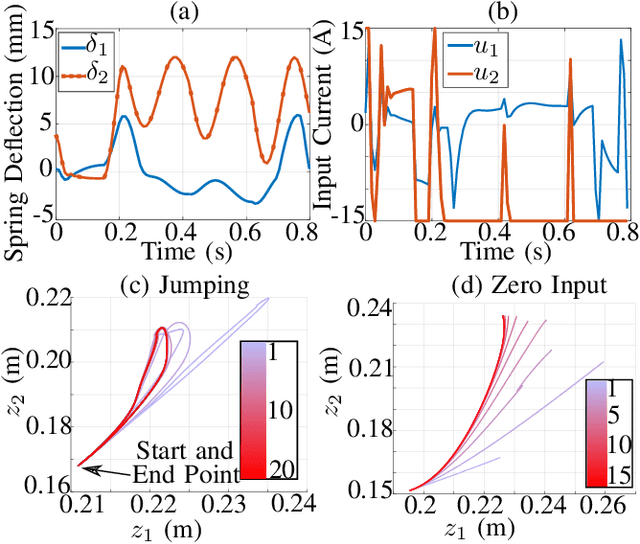
Series elastic robots are best able to follow trajectories which obey the limitations of their actuators, since they cannot instantly change their joint forces. In fact, the performance of series elastic actuators can surpass that of ideal force source actuators by storing and releasing energy. In this paper, we formulate the trajectory optimization problem for series elastic robots in a novel way based on sequential linear programming. Our framework is unique in the separation of the actuator dynamics from the rest of the dynamics, and in the use of a tunable pseudo-mass parameter that improves the discretization accuracy of our approach. The actuator dynamics are truly linear, which allows them to be excluded from trust-region mechanics. This causes our algorithm to have similar run times with and without the actuator dynamics. We demonstrate our optimization algorithm by tuning high performance behaviors for a single-leg robot in simulation and on hardware for a single degree-of-freedom actuator testbed. The results show that compliance allows for faster motions and takes a similar amount of computation time.