 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimBEV: A Synthetic Multi-Task Multi-Sensor Driving Data Generation Tool and Dataset
Feb 04, 2025



Bird's-eye view (BEV) perception for autonomous driving has garnered significant attention in recent years, in part because BEV representation facilitates the fusion of multi-sensor data. This enables a variety of perception tasks including BEV segmentation, a concise view of the environment that can be used to plan a vehicle's trajectory. However, this representation is not fully supported by existing datasets, and creation of new datasets can be a time-consuming endeavor. To address this problem, in this paper we introduce SimBEV, an extensively configurable and scalable randomized synthetic data generation tool that incorporates information from multiple sources to capture accurate BEV ground truth data, supports a comprehensive array of sensors, and enables a variety of perception tasks including BEV segmentation and 3D object detection. We use SimBEV to create the SimBEV dataset, a large collection of annotated perception data from diverse driving scenarios.
X-CAR: An Experimental Vehicle Platform for Connected Autonomy Research Powered by CARMA
Apr 06, 2022
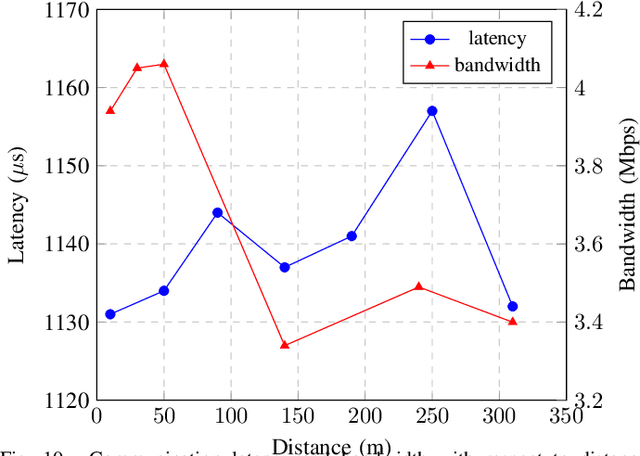
Autonomous vehicles promise a future with a safer, cleaner, more efficient, and more reliable transportation system. However, the current approach to autonomy has focused on building small, disparate intelligences that are closed off to the rest of the world. Vehicle connectivity has been proposed as a solution, relying on a vision of the future where a mix of connected autonomous and human-driven vehicles populate the road. Developed by the U.S. Department of Transportation Federal Highway Administration as a reusable, extensible platform for controlling connected autonomous vehicles, the CARMA Platform is one of the technologies enabling this connected future. Nevertheless, the adoption of the CARMA Platform has been slow, with a contributing factor being the limited, expensive, and somewhat old vehicle configurations that are officially supported. To alleviate this problem, we propose X-CAR (eXperimental vehicle platform for Connected Autonomy Research). By implementing the CARMA Platform on more affordable, high quality hardware, X-CAR aims to increase the versatility of the CARMA Platform and facilitate its adoption for research and development of connected driving automation.
Automating Abnormality Detection in Musculoskeletal Radiographs through Deep Learning
Oct 21, 2020


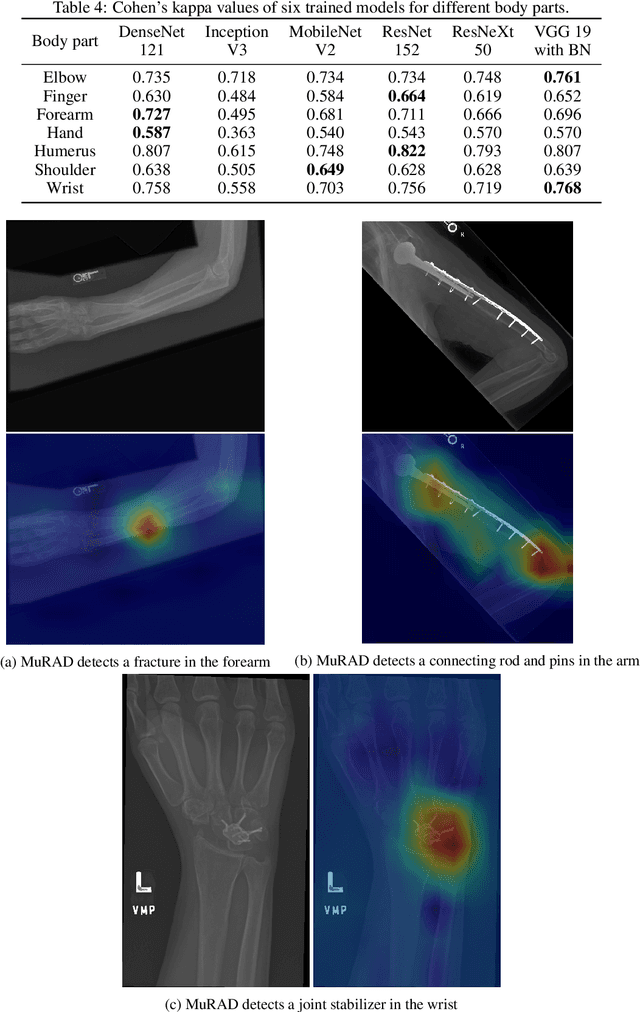
This paper introduces MuRAD (Musculoskeletal Radiograph Abnormality Detection tool), a tool that can help radiologists automate the detection of abnormalities in musculoskeletal radiographs (bone X-rays). MuRAD utilizes a Convolutional Neural Network (CNN) that can accurately predict whether a bone X-ray is abnormal, and leverages Class Activation Map (CAM) to localize the abnormality in the image. MuRAD achieves an F1 score of 0.822 and a Cohen's kappa of 0.699, which is comparable to the performance of expert radiologists.
Sentinel: An Onboard System for Intelligent Vehicles to Reduce Traffic Delay during Freeway Incidents
Sep 10, 2020
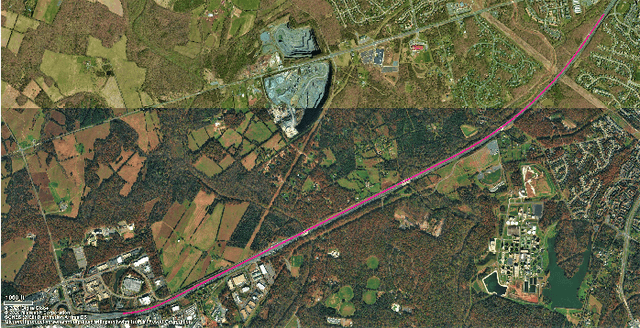
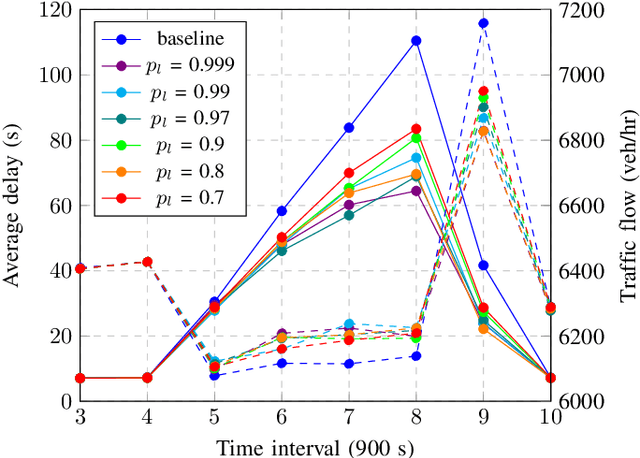

This paper introduces Sentinel, an onboard system that guides the lane change behavior of intelligent vehicles during a freeway incident to reduce congestion and delay. Sentinel is built upon a probabilistic prediction model that uses several traffic- and driver-related parameters to estimate the probability of reaching a target position on the road using a number of lane changes. When an incident blocking the lane of an intelligent vehicle is detected, Sentinel starts estimating the probability of successfully departing the blocked lane before reaching the point of incident and alerts the vehicle to depart that lane when the probability drops below a certain threshold. To understand the impact of Sentinel on traffic flow and delay, it is used in a simulation case study of a four-lane segment of the I-66 interstate highway in the U.S. where the rightmost lane is temporarily blocked due to an incident. The results show that Sentinel can reduce average delay by up to 37%, depending on incident duration, Sentinel penetration rate, and traffic flow. In combination with Traffic Incident Management systems, Sentinel can be a valuable asset in reducing delay and saving billions of dollars in the cost of congestion on freeways.
Estimating the Probability That a Vehicle Reaches a Near-Term Goal State Using Multiple Lane Changes
Apr 20, 2020
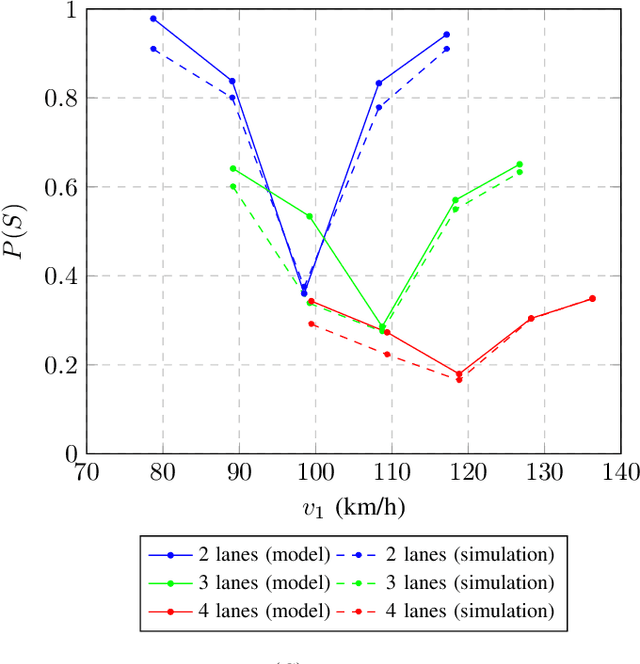


This paper presents a model to estimate the probability of reaching a near-term goal state based on parameters corresponding to traffic flow and driving behavior. In recent years developing accurate models of driver behavior and control algorithms for lane changes has been an integral part of research on autonomous driving and advanced driver-assistant systems (ADAS). However, there has not been many attempts at accurately estimating the probability that a vehicle can reach a near-term goal state using multiple, successive lane changes. Knowing this information can help design advance warning systems that increase driver safety and traffic throughput, and improve the cooperative behavior of autonomous vehicles. The model presented in this paper is first formulated for a two-lane road segment by systematically reducing the number of parameters involved and transforming the problem into an abstract form, for which the probability can be calculated numerically. The model is then extended to cases with a higher number of lanes using the law of total probability. VISSIM simulations are used to validate the predictions of the model and study the effect of different parameters on the probability. For most cases, simulation results are within four percent of model predictions, and the effect of different parameters such as driving behavior and traffic density on the probability matches our intuition. The model is implemented with near real-time performance and calculation time increases linearly with the number of lanes.