 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMA-VLCM: A Vision Language Critic Model for Value Estimation of Policies in Multi-Agent Team Settings
Mar 16, 2026Multi-agent reinforcement learning (MARL) commonly relies on a centralized critic to estimate the value function. However, learning such a critic from scratch is highly sample-inefficient and often lacks generalization across environments. At the same time, large vision-language-action models (VLAs) trained on internet-scale data exhibit strong multimodal reasoning and zero-shot generalization capabilities, yet directly deploying them for robotic execution remains computationally prohibitive, particularly in heterogeneous multi-robot systems with diverse embodiments and resource constraints. To address these challenges, we propose Multi-Agent Vision-Language-Critic Models (MA-VLCM), a framework that replaces the learned centralized critic in MARL with a pretrained vision-language model fine-tuned to evaluate multi-agent behavior. MA-VLCM acts as a centralized critic conditioned on natural language task descriptions, visual trajectory observations, and structured multi-agent state information. By eliminating critic learning during policy optimization, our approach significantly improves sample efficiency while producing compact execution policies suitable for deployment on resource-constrained robots. Results show good zero-shot return estimation on models with differing VLM backbones on in-distribution and out-of-distribution scenarios in multi-agent team settings
Cooperative Probabilistic Trajectory Forecasting under Occlusion
Dec 06, 2023



Perception and planning under occlusion is essential for safety-critical tasks. Occlusion-aware planning often requires communicating the information of the occluded object to the ego agent for safe navigation. However, communicating rich sensor information under adverse conditions during communication loss and limited bandwidth may not be always feasible. Further, in GPS denied environments and indoor navigation, localizing and sharing of occluded objects can be challenging. To overcome this, relative pose estimation between connected agents sharing a common field of view can be a computationally effective way of communicating information about surrounding objects. In this paper, we design an end-to-end network that cooperatively estimates the current states of occluded pedestrian in the reference frame of ego agent and then predicts the trajectory with safety guarantees. Experimentally, we show that the uncertainty-aware trajectory prediction of occluded pedestrian by the ego agent is almost similar to the ground truth trajectory assuming no occlusion. The current research holds promise for uncertainty-aware navigation among multiple connected agents under occlusion.
Pedestrian Trajectory Forecasting Using Deep Ensembles Under Sensing Uncertainty
May 26, 2023One of the fundamental challenges in the prediction of dynamic agents is robustness. Usually, most predictions are deterministic estimates of future states which are over-confident and prone to error. Recently, few works have addressed capturing uncertainty during forecasting of future states. However, these probabilistic estimation methods fail to account for the upstream noise in perception data during tracking. Sensors always have noise and state estimation becomes even more difficult under adverse weather conditions and occlusion. Traditionally, Bayes filters have been used to fuse information from noisy sensors to update states with associated belief. But, they fail to address non-linearities and long-term predictions. Therefore, we propose an end-to-end estimator that can take noisy sensor measurements and make robust future state predictions with uncertainty bounds while simultaneously taking into consideration the upstream perceptual uncertainty. For the current research, we consider an encoder-decoder based deep ensemble network for capturing both perception and predictive uncertainty simultaneously. We compared the current model to other approximate Bayesian inference methods. Overall, deep ensembles provided more robust predictions and the consideration of upstream uncertainty further increased the estimation accuracy for the model.
Uncertainty estimation of pedestrian future trajectory using Bayesian approximation
May 04, 2022

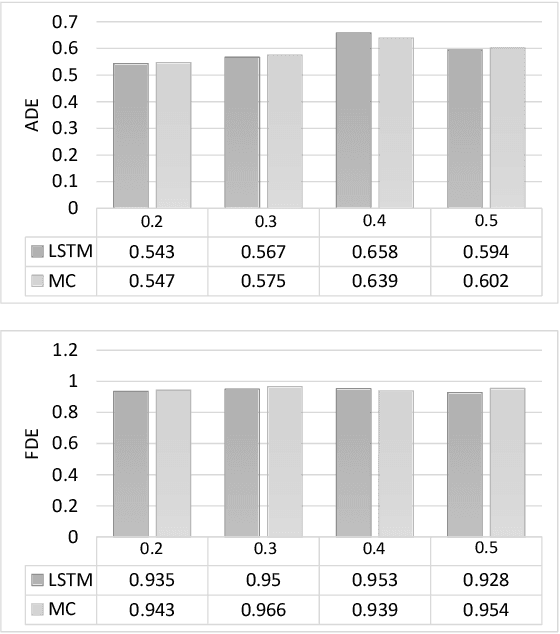
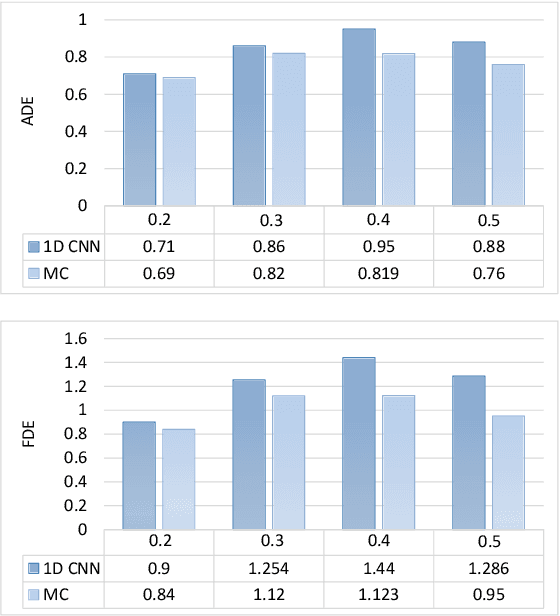
Past research on pedestrian trajectory forecasting mainly focused on deterministic predictions which provide only point estimates of future states. These future estimates can help an autonomous vehicle plan its trajectory and avoid collision. However, under dynamic traffic scenarios, planning based on deterministic predictions is not trustworthy. Rather, estimating the uncertainty associated with the predicted states with a certain level of confidence can lead to robust path planning. Hence, the authors propose to quantify this uncertainty during forecasting using stochastic approximation which deterministic approaches fail to capture. The current method is simple and applies Bayesian approximation during inference to standard neural network architectures for estimating uncertainty. The authors compared the predictions between the probabilistic neural network (NN) models with the standard deterministic models. The results indicate that the mean predicted path of probabilistic models was closer to the ground truth when compared with the deterministic prediction. Further, the effect of stochastic dropout of weights and long-term prediction on future state uncertainty has been studied. It was found that the probabilistic models produced better performance metrics like average displacement error (ADE) and final displacement error (FDE). Finally, the study has been extended to multiple datasets providing a comprehensive comparison for each model.
X-CAR: An Experimental Vehicle Platform for Connected Autonomy Research Powered by CARMA
Apr 06, 2022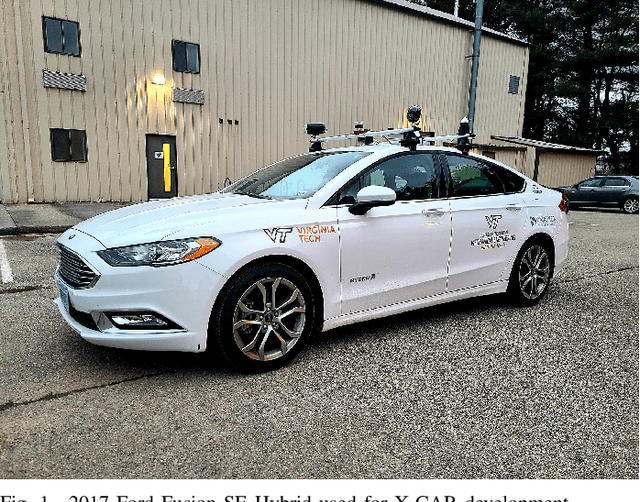
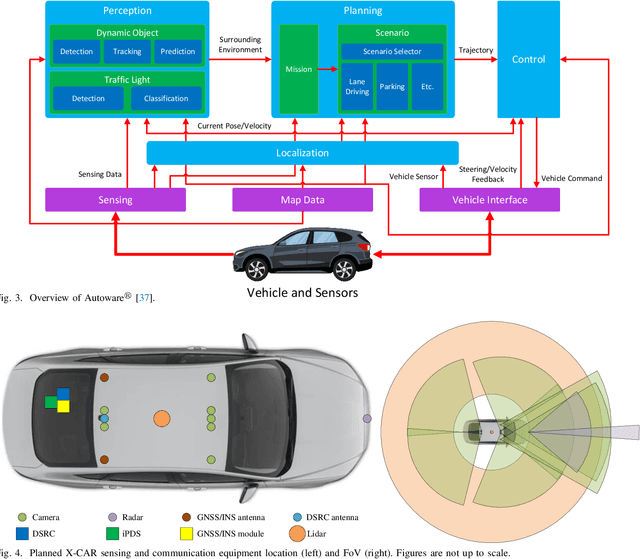
Autonomous vehicles promise a future with a safer, cleaner, more efficient, and more reliable transportation system. However, the current approach to autonomy has focused on building small, disparate intelligences that are closed off to the rest of the world. Vehicle connectivity has been proposed as a solution, relying on a vision of the future where a mix of connected autonomous and human-driven vehicles populate the road. Developed by the U.S. Department of Transportation Federal Highway Administration as a reusable, extensible platform for controlling connected autonomous vehicles, the CARMA Platform is one of the technologies enabling this connected future. Nevertheless, the adoption of the CARMA Platform has been slow, with a contributing factor being the limited, expensive, and somewhat old vehicle configurations that are officially supported. To alleviate this problem, we propose X-CAR (eXperimental vehicle platform for Connected Autonomy Research). By implementing the CARMA Platform on more affordable, high quality hardware, X-CAR aims to increase the versatility of the CARMA Platform and facilitate its adoption for research and development of connected driving automation.