 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic RRT Connect with intermediate goal selection for online planning of autonomous vehicles
May 14, 2023Rapidly Exploring Random Trees (RRT) is one of the most widely used algorithms for motion planning in the field of robotics. To reduce the exploration time, RRT-Connect was introduced where two trees are simultaneously formed and eventually connected. Probabilistic RRT used the concept of position probability map to introduce goal biasing for faster convergence. In this paper, we propose a modified method to combine the pRRT and RRT-Connect techniques and obtain a feasible trajectory around the obstacles quickly. Instead of forming a single tree from the start point to the destination point, intermediate goal points are selected around the obstacles. Multiple trees are formed to connect the start, destination, and intermediate goal points. These partial trees are eventually connected to form an overall safe path around the obstacles. The obtained path is tracked using an MPC + Stanley controller which results in a trajectory with control commands at each time step. The trajectories generated by the proposed methods are more optimal and in accordance with human intuition. The algorithm is compared with the standard RRT and pRRT for studying its relative performance.
X-CAR: An Experimental Vehicle Platform for Connected Autonomy Research Powered by CARMA
Apr 06, 2022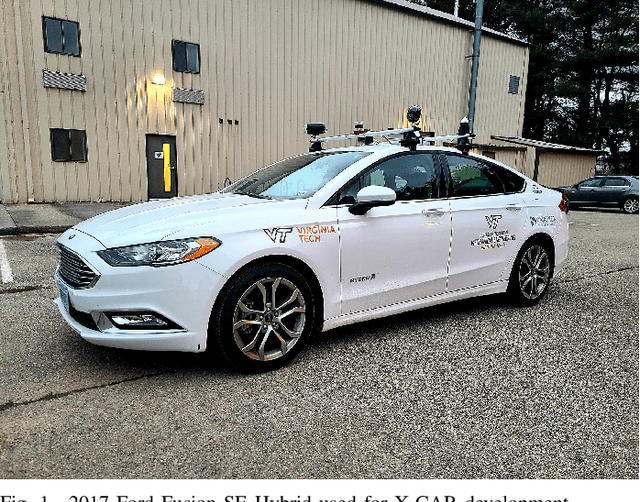
Autonomous vehicles promise a future with a safer, cleaner, more efficient, and more reliable transportation system. However, the current approach to autonomy has focused on building small, disparate intelligences that are closed off to the rest of the world. Vehicle connectivity has been proposed as a solution, relying on a vision of the future where a mix of connected autonomous and human-driven vehicles populate the road. Developed by the U.S. Department of Transportation Federal Highway Administration as a reusable, extensible platform for controlling connected autonomous vehicles, the CARMA Platform is one of the technologies enabling this connected future. Nevertheless, the adoption of the CARMA Platform has been slow, with a contributing factor being the limited, expensive, and somewhat old vehicle configurations that are officially supported. To alleviate this problem, we propose X-CAR (eXperimental vehicle platform for Connected Autonomy Research). By implementing the CARMA Platform on more affordable, high quality hardware, X-CAR aims to increase the versatility of the CARMA Platform and facilitate its adoption for research and development of connected driving automation.