 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating the Probability That a Vehicle Reaches a Near-Term Goal State Using Multiple Lane Changes
Paper and Code
Apr 20, 2020
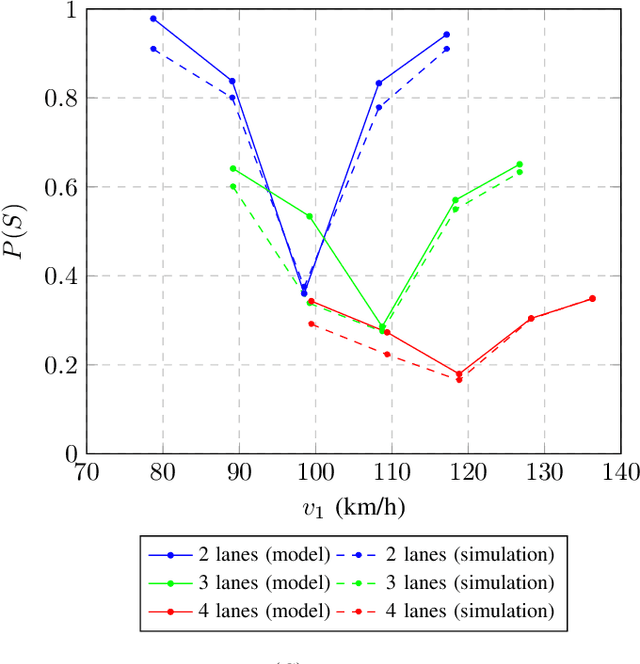


This paper presents a model to estimate the probability of reaching a near-term goal state based on parameters corresponding to traffic flow and driving behavior. In recent years developing accurate models of driver behavior and control algorithms for lane changes has been an integral part of research on autonomous driving and advanced driver-assistant systems (ADAS). However, there has not been many attempts at accurately estimating the probability that a vehicle can reach a near-term goal state using multiple, successive lane changes. Knowing this information can help design advance warning systems that increase driver safety and traffic throughput, and improve the cooperative behavior of autonomous vehicles. The model presented in this paper is first formulated for a two-lane road segment by systematically reducing the number of parameters involved and transforming the problem into an abstract form, for which the probability can be calculated numerically. The model is then extended to cases with a higher number of lanes using the law of total probability. VISSIM simulations are used to validate the predictions of the model and study the effect of different parameters on the probability. For most cases, simulation results are within four percent of model predictions, and the effect of different parameters such as driving behavior and traffic density on the probability matches our intuition. The model is implemented with near real-time performance and calculation time increases linearly with the number of lanes.