 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputing the Strategy to Commit to in Polymatrix Games
Jul 31, 2018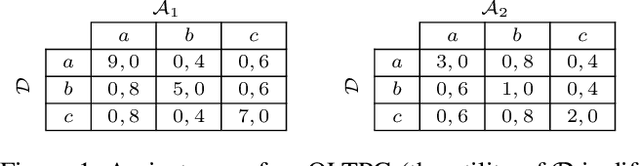


Leadership games provide a powerful paradigm to model many real-world settings. Most literature focuses on games with a single follower who acts optimistically, breaking ties in favour of the leader. Unfortunately, for real-world applications, this is unlikely. In this paper, we look for efficiently solvable games with multiple followers who play either optimistically or pessimistically, i.e., breaking ties in favour or against the leader. We study the computational complexity of finding or approximating an optimistic or pessimistic leader-follower equilibrium in specific classes of succinct games---polymatrix like---which are equivalent to 2-player Bayesian games with uncertainty over the follower, with interdependent or independent types. Furthermore, we provide an exact algorithm to find a pessimistic equilibrium for those game classes. Finally, we show that in general polymatrix games the computation is harder even when players are forced to play pure strategies.
How to Maximize the Spread of Social Influence: A Survey
Jun 19, 2018
This survey presents the main results achieved for the influence maximization problem in social networks. This problem is well studied in the literature and, thanks to its recent applications, some of which currently deployed on the field, it is receiving more and more attention in the scientific community. The problem can be formulated as follows: given a graph, with each node having a certain probability of influencing its neighbors, select a subset of vertices so that the number of nodes in the network that are influenced is maximized. Starting from this model, we introduce the main theoretical developments and computational results that have been achieved, taking into account different diffusion models describing how the information spreads throughout the network, various ways in which the sources of information could be placed, and how to tackle the problem in the presence of uncertainties affecting the network. Finally, we present one of the main application that has been developed and deployed exploiting tools and techniques previously discussed.
Facing Multiple Attacks in Adversarial Patrolling Games with Alarmed Targets
Jun 19, 2018



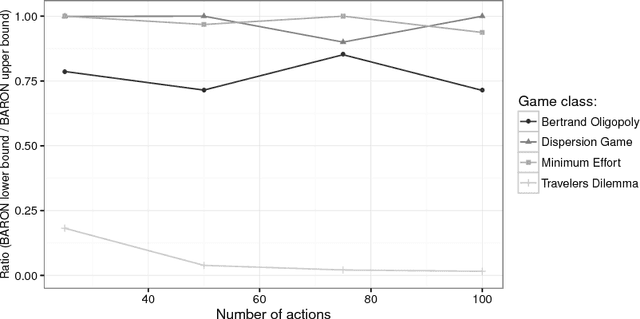
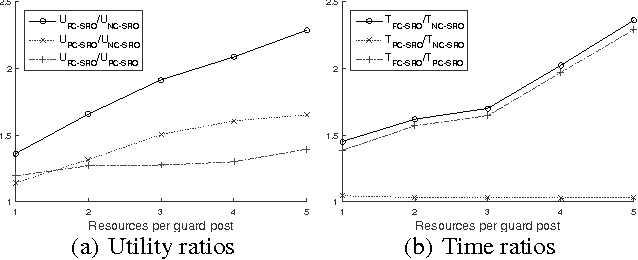
We focus on adversarial patrolling games on arbitrary graphs, where the Defender can control a mobile resource, the targets are alarmed by an alarm system, and the Attacker can observe the actions of the mobile resource of the Defender and perform different attacks exploiting multiple resources. This scenario can be modeled as a zero-sum extensive-form game in which each player can play multiple times. The game tree is exponentially large both in the size of the graph and in the number of attacking resources. We show that when the number of the Attacker's resources is free, the problem of computing the equilibrium path is NP-hard, while when the number of resources is fixed, the equilibrium path can be computed in poly-time. We provide a dynamic-programming algorithm that, given the number of the Attacker's resources, computes the equilibrium path requiring poly-time in the size of the graph and exponential time in the number of the resources. Furthermore, since in real-world scenarios it is implausible that the Defender knows the number of attacking resources, we study the robustness of the Defender's strategy when she makes a wrong guess about that number. We show that even the error of just a single resource can lead to an arbitrary inefficiency, when the inefficiency is defined as the ratio of the Defender's utilities obtained with a wrong guess and a correct guess. However, a more suitable definition of inefficiency is given by the difference of the Defender's utilities: this way, we observe that the higher the error in the estimation, the higher the loss for the Defender. Then, we investigate the performance of online algorithms when no information about the Attacker's resources is available. Finally, we resort to randomized online algorithms showing that we can obtain a competitive factor that is twice better than the one that can be achieved by any deterministic online algorithm.
Team-maxmin equilibrium: efficiency bounds and algorithms
Nov 18, 2016
The Team-maxmin equilibrium prescribes the optimal strategies for a team of rational players sharing the same goal and without the capability of correlating their strategies in strategic games against an adversary. This solution concept can capture situations in which an agent controls multiple resources-corresponding to the team members-that cannot communicate. It is known that such equilibrium always exists and it is unique (unless degeneracy) and these properties make it a credible solution concept to be used in real-world applications, especially in security scenarios. Nevertheless, to the best of our knowledge, the Team-maxmin equilibrium is almost completely unexplored in the literature. In this paper, we investigate bounds of (in)efficiency of the Team-maxmin equilibrium w.r.t. the Nash equilibria and w.r.t. the Maxmin equilibrium when the team members can play correlated strategies. Furthermore, we study a number of algorithms to find and/or approximate an equilibrium, discussing their theoretical guarantees and evaluating their performance by using a standard testbed of game instances.
Machine Learning Techniques for Stackelberg Security Games: a Survey
Sep 29, 2016The present survey aims at presenting the current machine learning techniques employed in security games domains. Specifically, we focused on papers and works developed by the Teamcore of University of Southern California, which deepened different directions in this field. After a brief introduction on Stackelberg Security Games (SSGs) and the poaching setting, the rest of the work presents how to model a boundedly rational attacker taking into account her human behavior, then describes how to face the problem of having attacker's payoffs not defined and how to estimate them and, finally, presents how online learning techniques have been exploited to learn a model of the attacker.
Multi-resource defensive strategies for patrolling games with alarm systems
Jun 07, 2016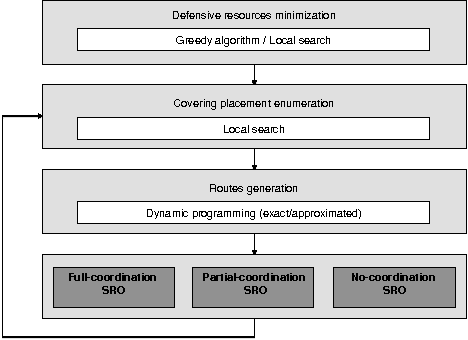
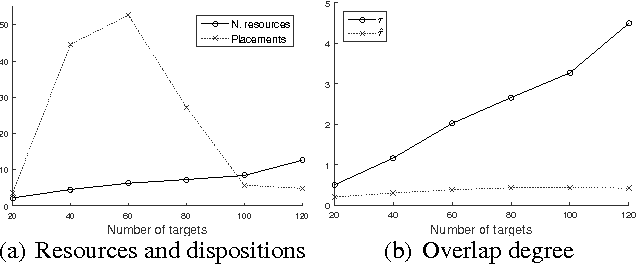
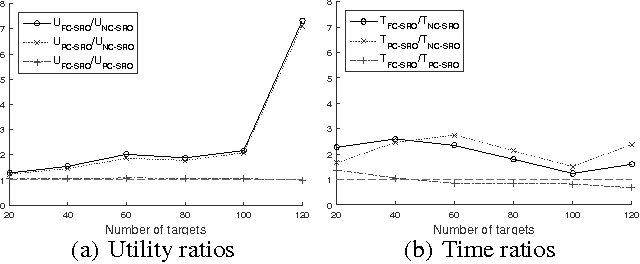
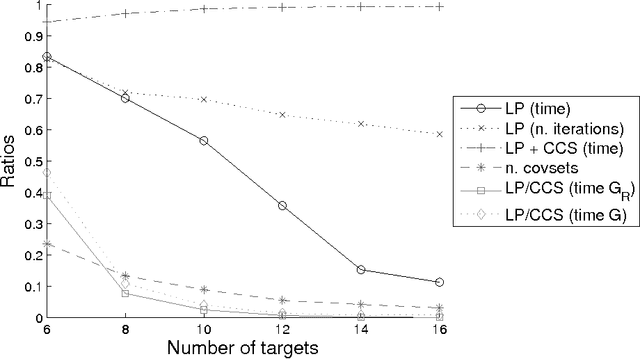
Security Games employ game theoretical tools to derive resource allocation strategies in security domains. Recent works considered the presence of alarm systems, even suffering various forms of uncertainty, and showed that disregarding alarm signals may lead to arbitrarily bad strategies. The central problem with an alarm system, unexplored in other Security Games, is finding the best strategy to respond to alarm signals for each mobile defensive resource. The literature provides results for the basic single-resource case, showing that even in that case the problem is computationally hard. In this paper, we focus on the challenging problem of designing algorithms scaling with multiple resources. First, we focus on finding the minimum number of resources assuring non-null protection to every target. Then, we deal with the computation of multi-resource strategies with different degrees of coordination among resources. For each considered problem, we provide a computational analysis and propose algorithmic methods.
Adversarial patrolling with spatially uncertain alarm signals
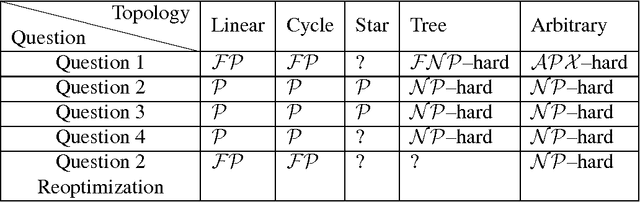
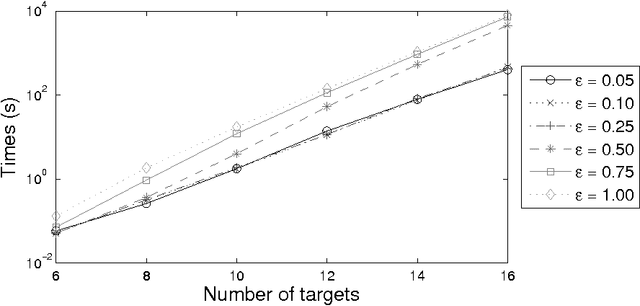
Jun 09, 2015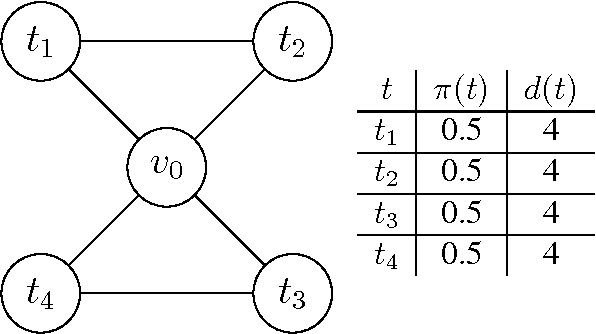
When securing complex infrastructures or large environments, constant surveillance of every area is not affordable. To cope with this issue, a common countermeasure is the usage of cheap but wide-ranged sensors, able to detect suspicious events that occur in large areas, supporting patrollers to improve the effectiveness of their strategies. However, such sensors are commonly affected by uncertainty. In the present paper, we focus on spatially uncertain alarm signals. That is, the alarm system is able to detect an attack but it is uncertain on the exact position where the attack is taking place. This is common when the area to be secured is wide such as in border patrolling and fair site surveillance. We propose, to the best of our knowledge, the first Patrolling Security Game model where a Defender is supported by a spatially uncertain alarm system which non-deterministically generates signals once a target is under attack. We show that finding the optimal strategy in arbitrary graphs is APX-hard even in zero-sum games and we provide two (exponential time) exact algorithms and two (polynomial time) approximation algorithms. Furthermore, we analyse what happens in environments with special topologies, showing that in linear and cycle graphs the optimal patrolling strategy can be found in polynomial time, de facto allowing our algorithms to be used in real-life scenarios, while in trees the problem is NP-hard. Finally, we show that without false positives and missed detections, the best patrolling strategy reduces to stay in a place, wait for a signal, and respond to it at best. This strategy is optimal even with non-negligible missed detection rates, which, unfortunately, affect every commercial alarm system. We evaluate our methods in simulation, assessing both quantitative and qualitative aspects.