 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTruly Adapting to Adversarial Constraints in Constrained MABs
Feb 16, 2026We study the constrained variant of the \emph{multi-armed bandit} (MAB) problem, in which the learner aims not only at minimizing the total loss incurred during the learning dynamic, but also at controlling the violation of multiple \emph{unknown} constraints, under both \emph{full} and \emph{bandit feedback}. We consider a non-stationary environment that subsumes both stochastic and adversarial models and where, at each round, both losses and constraints are drawn from distributions that may change arbitrarily over time. In such a setting, it is provably not possible to guarantee both sublinear regret and sublinear violation. Accordingly, prior work has mainly focused either on settings with stochastic constraints or on relaxing the benchmark with fully adversarial constraints (\emph{e.g.}, via competitive ratios with respect to the optimum). We provide the first algorithms that achieve optimal rates of regret and \emph{positive} constraint violation when the constraints are stochastic while the losses may vary arbitrarily, and that simultaneously yield guarantees that degrade smoothly with the degree of adversariality of the constraints. Specifically, under \emph{full feedback} we propose an algorithm attaining $\widetilde{\mathcal{O}}(\sqrt{T}+C)$ regret and $\widetilde{\mathcal{O}}(\sqrt{T}+C)$ {positive} violation, where $C$ quantifies the amount of non-stationarity in the constraints. We then show how to extend these guarantees when only bandit feedback is available for the losses. Finally, when \emph{bandit feedback} is available for the constraints, we design an algorithm achieving $\widetilde{\mathcal{O}}(\sqrt{T}+C)$ {positive} violation and $\widetilde{\mathcal{O}}(\sqrt{T}+C\sqrt{T})$ regret.
Replicable Constrained Bandits
Feb 16, 2026Algorithmic \emph{replicability} has recently been introduced to address the need for reproducible experiments in machine learning. A \emph{replicable online learning} algorithm is one that takes the same sequence of decisions across different executions in the same environment, with high probability. We initiate the study of algorithmic replicability in \emph{constrained} MAB problems, where a learner interacts with an unknown stochastic environment for $T$ rounds, seeking not only to maximize reward but also to satisfy multiple constraints. Our main result is that replicability can be achieved in constrained MABs. Specifically, we design replicable algorithms whose regret and constraint violation match those of non-replicable ones in terms of $T$. As a key step toward these guarantees, we develop the first replicable UCB-like algorithm for \emph{unconstrained} MABs, showing that algorithms that employ the optimism in-the-face-of-uncertainty principle can be replicable, a result that we believe is of independent interest.
The Sample Complexity of Uniform Approximation for Multi-Dimensional CDFs and Fixed-Price Mechanisms
Feb 11, 2026We study the sample complexity of learning a uniform approximation of an $n$-dimensional cumulative distribution function (CDF) within an error $ε> 0$, when observations are restricted to a minimal one-bit feedback. This serves as a counterpart to the multivariate DKW inequality under ''full feedback'', extending it to the setting of ''bandit feedback''. Our main result shows a near-dimensional-invariance in the sample complexity: we get a uniform $ε$-approximation with a sample complexity $\frac{1}{ε^3}{\log\left(\frac 1 ε\right)^{\mathcal{O}(n)}}$ over a arbitrary fine grid, where the dimensionality $n$ only affects logarithmic terms. As direct corollaries, we provide tight sample complexity bounds and novel regret guarantees for learning fixed-price mechanisms in small markets, such as bilateral trade settings.
Learning in Bayesian Stackelberg Games With Unknown Follower's Types
Jan 31, 2026We study online learning in Bayesian Stackelberg games, where a leader repeatedly interacts with a follower whose unknown private type is independently drawn at each round from an unknown probability distribution. The goal is to design algorithms that minimize the leader's regret with respect to always playing an optimal commitment computed with knowledge of the game. We consider, for the first time to the best of our knowledge, the most realistic case in which the leader does not know anything about the follower's types, i.e., the possible follower payoffs. This raises considerable additional challenges compared to the commonly studied case in which the payoffs of follower types are known. First, we prove a strong negative result: no-regret is unattainable under action feedback, i.e., when the leader only observes the follower's best response at the end of each round. Thus, we focus on the easier type feedback model, where the follower's type is also revealed. In such a setting, we propose a no-regret algorithm that achieves a regret of $\widetilde{O}(\sqrt{T})$, when ignoring the dependence on other parameters.
Better Regret Rates in Bilateral Trade via Sublinear Budget Violation
Jul 15, 2025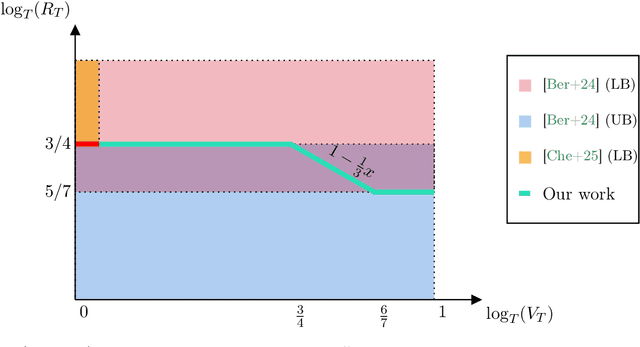
Bilateral trade is a central problem in algorithmic economics, and recent work has explored how to design trading mechanisms using no-regret learning algorithms. However, no-regret learning is impossible when budget balance has to be enforced at each time step. Bernasconi et al. [Ber+24] show how this impossibility can be circumvented by relaxing the budget balance constraint to hold only globally over all time steps. In particular, they design an algorithm achieving regret of the order of $\tilde O(T^{3/4})$ and provide a lower bound of $\Omega(T^{5/7})$. In this work, we interpolate between these two extremes by studying how the optimal regret rate varies with the allowed violation of the global budget balance constraint. Specifically, we design an algorithm that, by violating the constraint by at most $T^{\beta}$ for any given $\beta \in [\frac{3}{4}, \frac{6}{7}]$, attains regret $\tilde O(T^{1 - \beta/3})$. We complement this result with a matching lower bound, thus fully characterizing the trade-off between regret and budget violation. Our results show that both the $\tilde O(T^{3/4})$ upper bound in the global budget balance case and the $\Omega(T^{5/7})$ lower bound under unconstrained budget balance violation obtained by Bernasconi et al. [Ber+24] are tight.
No-Regret Learning Under Adversarial Resource Constraints: A Spending Plan Is All You Need!
Jun 16, 2025We study online decision making problems under resource constraints, where both reward and cost functions are drawn from distributions that may change adversarially over time. We focus on two canonical settings: $(i)$ online resource allocation where rewards and costs are observed before action selection, and $(ii)$ online learning with resource constraints where they are observed after action selection, under full feedback or bandit feedback. It is well known that achieving sublinear regret in these settings is impossible when reward and cost distributions may change arbitrarily over time. To address this challenge, we analyze a framework in which the learner is guided by a spending plan--a sequence prescribing expected resource usage across rounds. We design general (primal-)dual methods that achieve sublinear regret with respect to baselines that follow the spending plan. Crucially, the performance of our algorithms improves when the spending plan ensures a well-balanced distribution of the budget across rounds. We additionally provide a robust variant of our methods to handle worst-case scenarios where the spending plan is highly imbalanced. To conclude, we study the regret of our algorithms when competing against benchmarks that deviate from the prescribed spending plan.
Data-Dependent Regret Bounds for Constrained MABs
May 26, 2025This paper initiates the study of data-dependent regret bounds in constrained MAB settings. These bounds depend on the sequence of losses that characterize the problem instance. Thus, they can be much smaller than classical $\widetilde{\mathcal{O}}(\sqrt{T})$ regret bounds, while being equivalent to them in the worst case. Despite this, data-dependent regret bounds have been completely overlooked in constrained MAB settings. The goal of this paper is to answer the following question: Can data-dependent regret bounds be derived in the presence of constraints? We answer this question affirmatively in constrained MABs with adversarial losses and stochastic constraints. Specifically, our main focus is on the most challenging and natural settings with hard constraints, where the learner must ensure that the constraints are always satisfied with high probability. We design an algorithm with a regret bound consisting of two data-dependent terms. The first term captures the difficulty of satisfying the constraints, while the second one encodes the complexity of learning independently of the presence of constraints. We also prove a lower bound showing that these two terms are not artifacts of our specific approach and analysis, but rather the fundamental components that inherently characterize the complexities of the problem. Finally, in designing our algorithm, we also derive some novel results in the related (and easier) soft constraints settings, which may be of independent interest.
Regret Minimization for Piecewise Linear Rewards: Contracts, Auctions, and Beyond
Mar 03, 2025Most microeconomic models of interest involve optimizing a piecewise linear function. These include contract design in hidden-action principal-agent problems, selling an item in posted-price auctions, and bidding in first-price auctions. When the relevant model parameters are unknown and determined by some (unknown) probability distributions, the problem becomes learning how to optimize an unknown and stochastic piecewise linear reward function. Such a problem is usually framed within an online learning framework, where the decision-maker (learner) seeks to minimize the regret of not knowing an optimal decision in hindsight. This paper introduces a general online learning framework that offers a unified approach to tackle regret minimization for piecewise linear rewards, under a suitable monotonicity assumption commonly satisfied by microeconomic models. We design a learning algorithm that attains a regret of $\widetilde{O}(\sqrt{nT})$, where $n$ is the number of ``pieces'' of the reward function and $T$ is the number of rounds. This result is tight when $n$ is \emph{small} relative to $T$, specifically when $n \leq T^{1/3}$. Our algorithm solves two open problems in the literature on learning in microeconomic settings. First, it shows that the $\widetilde{O}(T^{2/3})$ regret bound obtained by Zhu et al. [Zhu+23] for learning optimal linear contracts in hidden-action principal-agent problems is not tight when the number of agent's actions is small relative to $T$. Second, our algorithm demonstrates that, in the problem of learning to set prices in posted-price auctions, it is possible to attain suitable (and desirable) instance-independent regret bounds, addressing an open problem posed by Cesa-Bianchi et al. [CBCP19].
Optimal Strong Regret and Violation in Constrained MDPs via Policy Optimization
Oct 03, 2024We study online learning in \emph{constrained MDPs} (CMDPs), focusing on the goal of attaining sublinear strong regret and strong cumulative constraint violation. Differently from their standard (weak) counterparts, these metrics do not allow negative terms to compensate positive ones, raising considerable additional challenges. Efroni et al. (2020) were the first to propose an algorithm with sublinear strong regret and strong violation, by exploiting linear programming. Thus, their algorithm is highly inefficient, leaving as an open problem achieving sublinear bounds by means of policy optimization methods, which are much more efficient in practice. Very recently, Muller et al. (2024) have partially addressed this problem by proposing a policy optimization method that allows to attain $\widetilde{\mathcal{O}}(T^{0.93})$ strong regret/violation. This still leaves open the question of whether optimal bounds are achievable by using an approach of this kind. We answer such a question affirmatively, by providing an efficient policy optimization algorithm with $\widetilde{\mathcal{O}}(\sqrt{T})$ strong regret/violation. Our algorithm implements a primal-dual scheme that employs a state-of-the-art policy optimization approach for adversarial (unconstrained) MDPs as primal algorithm, and a UCB-like update for dual variables.
Best-of-Both-Worlds Policy Optimization for CMDPs with Bandit Feedback
Oct 03, 2024We study online learning in constrained Markov decision processes (CMDPs) in which rewards and constraints may be either stochastic or adversarial. In such settings, Stradi et al.(2024) proposed the first best-of-both-worlds algorithm able to seamlessly handle stochastic and adversarial constraints, achieving optimal regret and constraint violation bounds in both cases. This algorithm suffers from two major drawbacks. First, it only works under full feedback, which severely limits its applicability in practice. Moreover, it relies on optimizing over the space of occupancy measures, which requires solving convex optimization problems, an highly inefficient task. In this paper, we provide the first best-of-both-worlds algorithm for CMDPs with bandit feedback. Specifically, when the constraints are stochastic, the algorithm achieves $\widetilde{\mathcal{O}}(\sqrt{T})$ regret and constraint violation, while, when they are adversarial, it attains $\widetilde{\mathcal{O}}(\sqrt{T})$ constraint violation and a tight fraction of the optimal reward. Moreover, our algorithm is based on a policy optimization approach, which is much more efficient than occupancy-measure-based methods.