 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeARKitScenes -- A Diverse Real-World Dataset For 3D Indoor Scene Understanding Using Mobile RGB-D Data
Nov 17, 2021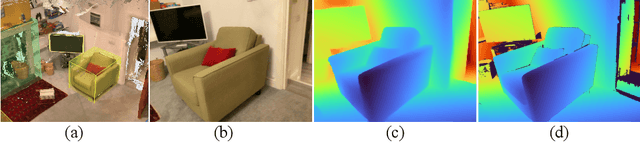
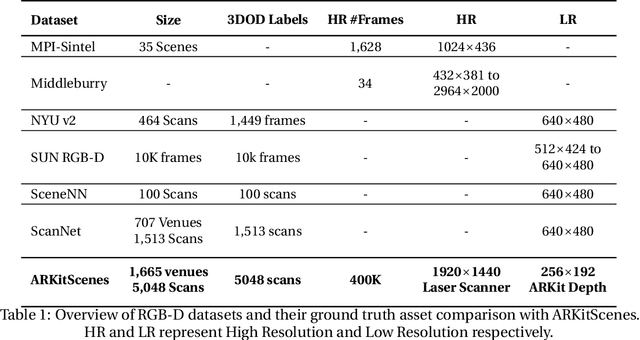
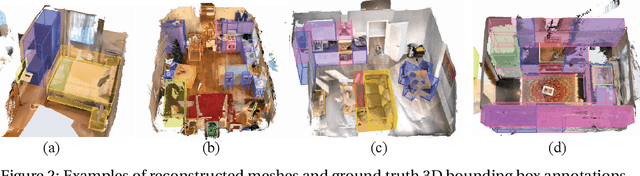
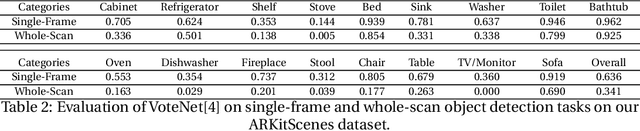
Scene understanding is an active research area. Commercial depth sensors, such as Kinect, have enabled the release of several RGB-D datasets over the past few years which spawned novel methods in 3D scene understanding. More recently with the launch of the LiDAR sensor in Apple's iPads and iPhones, high quality RGB-D data is accessible to millions of people on a device they commonly use. This opens a whole new era in scene understanding for the Computer Vision community as well as app developers. The fundamental research in scene understanding together with the advances in machine learning can now impact people's everyday experiences. However, transforming these scene understanding methods to real-world experiences requires additional innovation and development. In this paper we introduce ARKitScenes. It is not only the first RGB-D dataset that is captured with a now widely available depth sensor, but to our best knowledge, it also is the largest indoor scene understanding data released. In addition to the raw and processed data from the mobile device, ARKitScenes includes high resolution depth maps captured using a stationary laser scanner, as well as manually labeled 3D oriented bounding boxes for a large taxonomy of furniture. We further analyze the usefulness of the data for two downstream tasks: 3D object detection and color-guided depth upsampling. We demonstrate that our dataset can help push the boundaries of existing state-of-the-art methods and it introduces new challenges that better represent real-world scenarios.
A Little Is Enough: Circumventing Defenses For Distributed Learning
Feb 16, 2019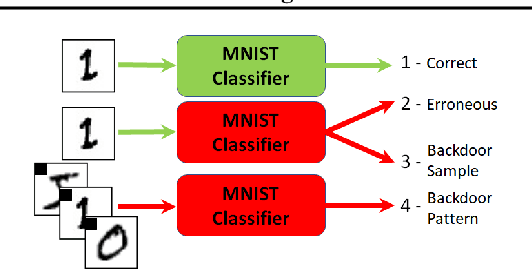
Distributed learning is central for large-scale training of deep-learning models. However, they are exposed to a security threat in which Byzantine participants can interrupt or control the learning process. Previous attack models and their corresponding defenses assume that the rogue participants are (a) omniscient (know the data of all other participants), and (b) introduce large change to the parameters. We show that small but well-crafted changes are sufficient, leading to a novel non-omniscient attack on distributed learning that go undetected by all existing defenses. We demonstrate our attack method works not only for preventing convergence but also for repurposing of the model behavior (backdooring). We show that 20% of corrupt workers are sufficient to degrade a CIFAR10 model accuracy by 50%, as well as to introduce backdoors into MNIST and CIFAR10 models without hurting their accuracy