 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeta-Reinforcement Learning for Robotic Industrial Insertion Tasks
May 23, 2020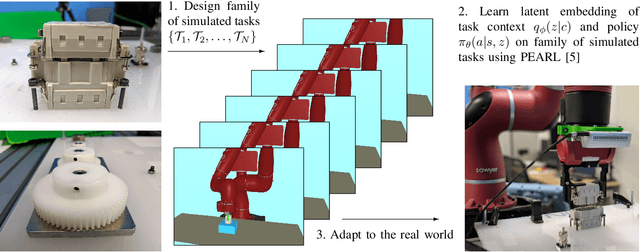


Robotic insertion tasks are characterized by contact and friction mechanics, making them challenging for conventional feedback control methods due to unmodeled physical effects. Reinforcement learning (RL) is a promising approach for learning control policies in such settings. However, RL can be unsafe during exploration and might require a large amount of real-world training data, which is expensive to collect. In this paper, we study how to use meta-reinforcement learning to solve the bulk of the problem in simulation by solving a family of simulated industrial insertion tasks and then adapt policies quickly in the real world. We demonstrate our approach by training an agent to successfully perform challenging real-world insertion tasks using less than 20 trials of real-world experience. Videos and other material are available at https://pearl-insertion.github.io/
Deep Reinforcement Learning for Industrial Insertion Tasks with Visual Inputs and Natural Rewards
Jun 13, 2019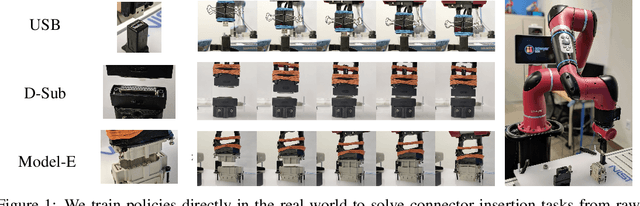
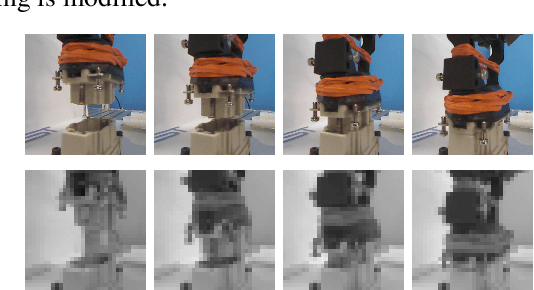
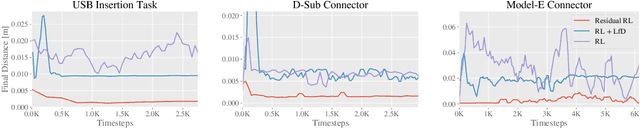
Connector insertion and many other tasks commonly found in modern manufacturing settings involve complex contact dynamics and friction. Since it is difficult to capture related physical effects with first-order modeling, traditional control methods often result in brittle and inaccurate controllers, which have to be manually tuned. Reinforcement learning (RL) methods have been demonstrated to be capable of learning controllers in such environments from autonomous interaction with the environment, but running RL algorithms in the real world poses sample efficiency and safety challenges. Moreover, in practical real-world settings we cannot assume access to perfect state information or dense reward signals. In this paper, we consider a variety of difficult industrial insertion tasks with visual inputs and different natural reward specifications, namely sparse rewards and goal images. We show that methods that combine RL with prior information, such as classical controllers or demonstrations, can solve these tasks from a reasonable amount of real-world interaction.