 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIndoor Navigation Assistance for Visually Impaired People via Dynamic SLAM and Panoptic Segmentation with an RGB-D Sensor
Apr 03, 2022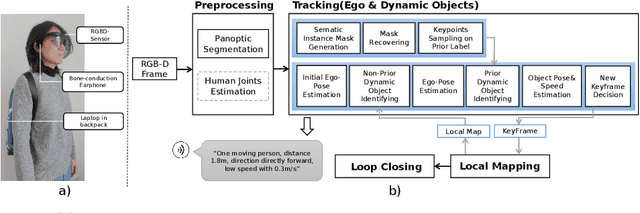
Exploring an unfamiliar indoor environment and avoiding obstacles is challenging for visually impaired people. Currently, several approaches achieve the avoidance of static obstacles based on the mapping of indoor scenes. To solve the issue of distinguishing dynamic obstacles, we propose an assistive system with an RGB-D sensor to detect dynamic information of a scene. Once the system captures an image, panoptic segmentation is performed to obtain the prior dynamic object information. With sparse feature points extracted from images and the depth information, poses of the user can be estimated. After the ego-motion estimation, the dynamic object can be identified and tracked. Then, poses and speed of tracked dynamic objects can be estimated, which are passed to the users through acoustic feedback.