 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEEG-X: Device-Agnostic and Noise-Robust Foundation Model for EEG
Nov 12, 2025



Foundation models for EEG analysis are still in their infancy, limited by two key challenges: (1) variability across datasets caused by differences in recording devices and configurations, and (2) the low signal-to-noise ratio (SNR) of EEG, where brain signals are often buried under artifacts and non-brain sources. To address these challenges, we present EEG-X, a device-agnostic and noise-robust foundation model for EEG representation learning. EEG-X introduces a novel location-based channel embedding that encodes spatial information and improves generalization across domains and tasks by allowing the model to handle varying channel numbers, combinations, and recording lengths. To enhance robustness against noise, EEG-X employs a noise-aware masking and reconstruction strategy in both raw and latent spaces. Unlike previous models that mask and reconstruct raw noisy EEG signals, EEG-X is trained to reconstruct denoised signals obtained through an artifact removal process, ensuring that the learned representations focus on neural activity rather than noise. To further enhance reconstruction-based pretraining, EEG-X introduces a dictionary-inspired convolutional transformation (DiCT) layer that projects signals into a structured feature space before computing reconstruction (MSE) loss, reducing noise sensitivity and capturing frequency- and shape-aware similarities. Experiments on datasets collected from diverse devices show that EEG-X outperforms state-of-the-art methods across multiple downstream EEG tasks and excels in cross-domain settings where pre-trained and downstream datasets differ in electrode layouts. The models and code are available at: https://github.com/Emotiv/EEG-X
EEGM2: An Efficient Mamba-2-Based Self-Supervised Framework for Long-Sequence EEG Modeling
Feb 25, 2025Deep learning has achieved significant progress in the development of electroencephalogram (EEG) foundation models, with Transformer-based architectures excelling at capturing long-range dependencies. However, their quadratic computational complexity presents challenges in memory efficiency, training, and inference speed, limiting their scalability and generalizability as a foundation model. In this paper, we propose EEGM2, a self-supervised framework based on structured state space duality (SSD) that overcomes these limitations. EEGM2 introduces three key innovations: (1) a reconstruction-based framework that captures both local and global EEG features through Mamba-2 structured state space models, (2) a spatiotemporal-aware loss function that enhances robustness to noise and preserves spectral information, and (3) a multi-branch receptive field input embedding strategy that improves cross-subject generalization and stability for EEG sequences of varying lengths. In comparison to traditional pretraining methods, on raw EEG or latent representation spaces, EEGM2 shows superior performance on long-sequence tasks, where conventional models struggle. Our experimental results on six EEG datasets validate that EEGM2 not only achieves state-of-the-art cross-domain accuracy but also reduces computational overhead, making it a more efficient solution for deployment on resource-constrained BCI devices.
EEG2Rep: Enhancing Self-supervised EEG Representation Through Informative Masked Inputs
Feb 17, 2024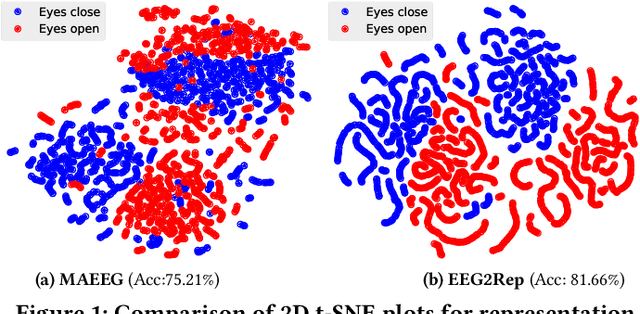
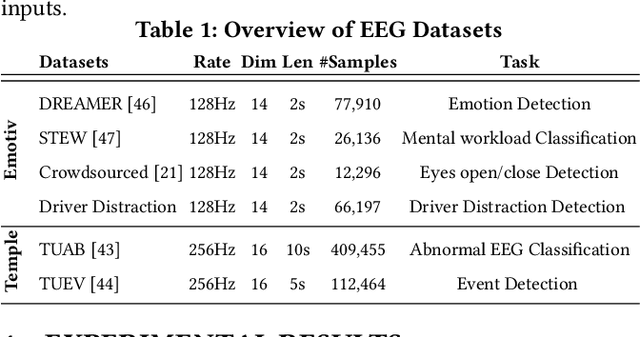
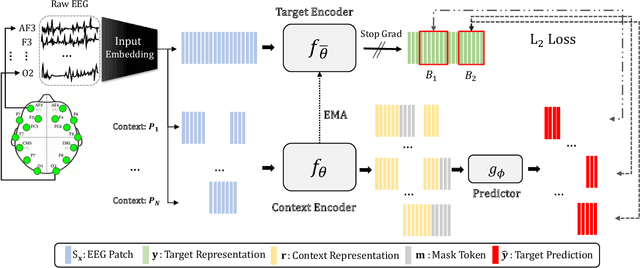
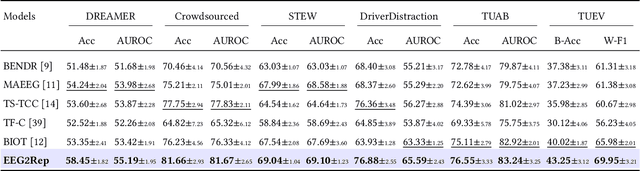
Self-supervised approaches for electroencephalography (EEG) representation learning face three specific challenges inherent to EEG data: (1) The low signal-to-noise ratio which challenges the quality of the representation learned, (2) The wide range of amplitudes from very small to relatively large due to factors such as the inter-subject variability, risks the models to be dominated by higher amplitude ranges, and (3) The absence of explicit segmentation in the continuous-valued sequences which can result in less informative representations. To address these challenges, we introduce EEG2Rep, a self-prediction approach for self-supervised representation learning from EEG. Two core novel components of EEG2Rep are as follows: 1) Instead of learning to predict the masked input from raw EEG, EEG2Rep learns to predict masked input in latent representation space, and 2) Instead of conventional masking methods, EEG2Rep uses a new semantic subsequence preserving (SSP) method which provides informative masked inputs to guide EEG2Rep to generate rich semantic representations. In experiments on 6 diverse EEG tasks with subject variability, EEG2Rep significantly outperforms state-of-the-art methods. We show that our semantic subsequence preserving improves the existing masking methods in self-prediction literature and find that preserving 50\% of EEG recordings will result in the most accurate results on all 6 tasks on average. Finally, we show that EEG2Rep is robust to noise addressing a significant challenge that exists in EEG data. Models and code are available at: https://github.com/Navidfoumani/EEG2Rep
Detecting Driver's Distraction using Long-term Recurrent Convolutional Network
Apr 14, 2020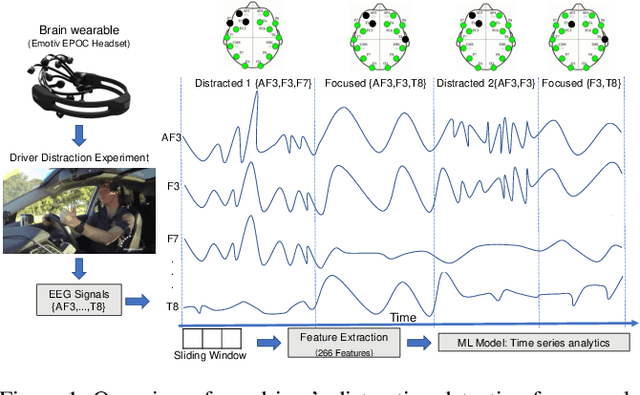
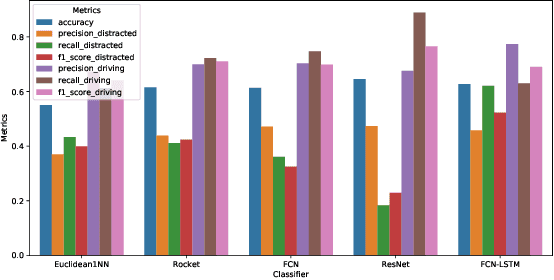
In this study we demonstrate a novel Brain Computer Interface (BCI) approach to detect driver distraction events to improve road safety. We use a commercial wireless headset that generates EEG signals from the brain. We collected real EEG signals from participants who undertook a 40-minute driving simulation and were required to perform different tasks while driving. These signals are segmented into short windows and labelled using a time series classification (TSC) model. We studied different TSC approaches and designed a Long-term Recurrent Convolutional Network (LCRN) model for this task. Our results showed that our LRCN model performs better than the state of the art TSC models at detecting driver distraction events.