 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeP2 Explore: Efficient Exploration in Unknown Clustered Environment with Floor Plan Prediction
Sep 17, 2024



Robot exploration aims at constructing unknown environments and it is important to achieve it with shorter paths. Traditional methods focus on optimizing the visiting order based on current observations, which may lead to local-minimal results. Recently, by predicting the structure of the unseen environment, the exploration efficiency can be further improved. However, in a cluttered environment, due to the randomness of obstacles, the ability for prediction is limited. Therefore, to solve this problem, we propose a map prediction algorithm that can be efficient in predicting the layout of noisy indoor environments. We focus on the scenario of 2D exploration. First, we perform floor plan extraction by denoising the cluttered map using deep learning. Then, we use a floor plan-based algorithm to improve the prediction accuracy. Additionally, we extract the segmentation of rooms and construct their connectivity based on the predicted map, which can be used for downstream tasks. To validate the effectiveness of the proposed method, it is applied to exploration tasks. Extensive experiments show that even in cluttered scenes, our proposed method can benefit efficiency.
RHAML: Rendezvous-based Hierarchical Architecture for Mutual Localization
May 20, 2024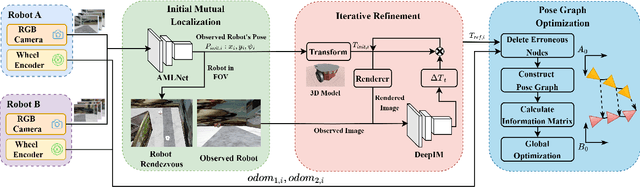
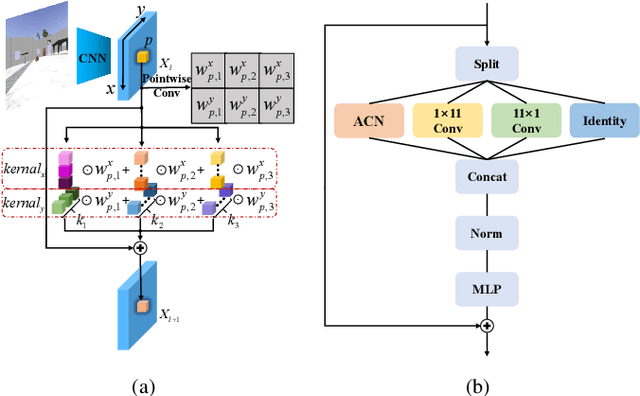


Mutual localization serves as the foundation for collaborative perception and task assignment in multi-robot systems. Effectively utilizing limited onboard sensors for mutual localization between marker-less robots is a worthwhile goal. However, due to inadequate consideration of large scale variations of the observed robot and localization refinement, previous work has shown limited accuracy when robots are equipped only with RGB cameras. To enhance the precision of localization, this paper proposes a novel rendezvous-based hierarchical architecture for mutual localization (RHAML). Firstly, to learn multi-scale robot features, anisotropic convolutions are introduced into the network, yielding initial localization results. Then, the iterative refinement module with rendering is employed to adjust the observed robot poses. Finally, the pose graph is conducted to globally optimize all localization results, which takes into account multi-frame observations. Therefore, a flexible architecture is provided that allows for the selection of appropriate modules based on requirements. Simulations demonstrate that RHAML effectively addresses the problem of multi-robot mutual localization, achieving translation errors below 2 cm and rotation errors below 0.5 degrees when robots exhibit 5 m of depth variation. Moreover, its practical utility is validated by applying it to map fusion when multi-robots explore unknown environments.
Multi-Robot Rendezvous in Unknown Environment with Limited Communication
May 14, 2024



Rendezvous aims at gathering all robots at a specific location, which is an important collaborative behavior for multirobot systems. However, in an unknown environment, it is challenging to achieve rendezvous. Previous researches mainly focus on special scenarios where communication is not allowed and each robot executes a random searching strategy, which is highly time-consuming, especially in large-scale environments. In this work, we focus on rendezvous in unknown environments where communication is available. We divide this task into two steps: rendezvous based environment exploration with relative pose (RP) estimation and rendezvous point election. A new strategy called partitioned and incomplete exploration for rendezvous (PIER) is proposed to efficiently explore the unknown environment, where lightweight topological maps are constructed and shared among robots for RP estimation with very few communications. Then, a rendezvous point selection algorithm based on the merged topological map is proposed for efficient rendezvous for multi-robot systems. The effectiveness of the proposed methods is validated in both simulations and real-world experiments.
FHT-Map: Feature-based Hierarchical Topological Map for Relocalization and Path Planning
Oct 21, 2023



Topological maps are favorable for their small storage compared to geometric map. However, they are limited in relocalization and path planning capabilities. To solve this problem, a feature-based hierarchical topological map (FHT-Map) is proposed along with a real-time map construction algorithm for robot exploration. Specifically, the FHT-Map utilizes both RGB cameras and LiDAR information and consists of two types of nodes: main node and support node. Main nodes will store visual information compressed by convolutional neural network and local laser scan data to enhance subsequent relocalization capability. Support nodes retain a minimal amount of data to ensure storage efficiency while facilitating path planning. After map construction with robot exploration, the FHT-Map can be used by other robots for relocalization and path planning. Experiments are conducted in Gazebo simulator, and the results demonstrate that the proposed FHT-Map can effectively improve relocalization and path planning capability compared with other topological maps. Moreover, experiments on hierarchical architecture are implemented to show the necessity of two types of nodes.