 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Domain Adversarial Self-Calibration for Electromyographic-based Gesture Recognition
Dec 21, 2019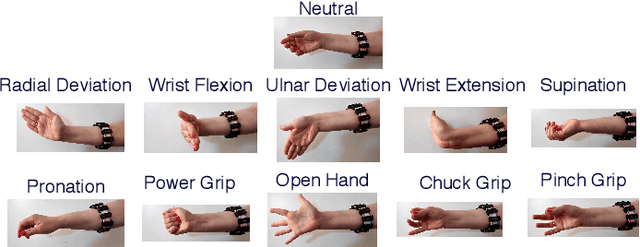
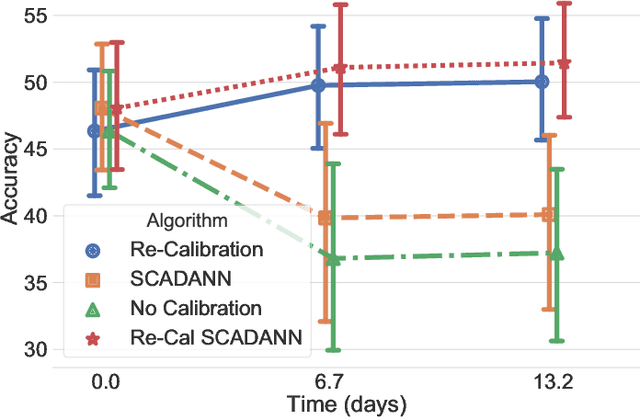
Surface electromyography (sEMG) provides an intuitive and non-invasive interface from which to control machines. However, preserving the myoelectric control system's performance over multiple days is challenging, due to the transient nature of this recording technique. In practice, if the system is to remain usable, a time-consuming and periodic re-calibration is necessary. In the case where the sEMG interface is employed every few days, the user might need to do this re-calibration before every use. Thus, severely limiting the practicality of such a control method. Consequently, this paper proposes tackling the especially challenging task of adapting to sEMG signals when multiple days have elapsed between each recording, by presenting SCADANN, a new, deep learning-based, self-calibrating algorithm. SCADANN is ranked against three state of the art domain adversarial algorithms and a multiple-vote self-calibrating algorithm on both offline and online datasets. Overall, SCADANN is shown to systematically improve classifiers' performance over no adaptation and ranks first on almost all the cases tested.
Virtual Reality to Study the Gap Between Offline and Real-Time EMG-based Gesture Recognition
Dec 16, 2019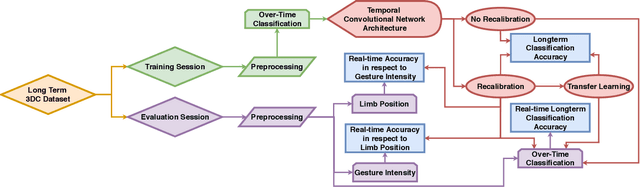
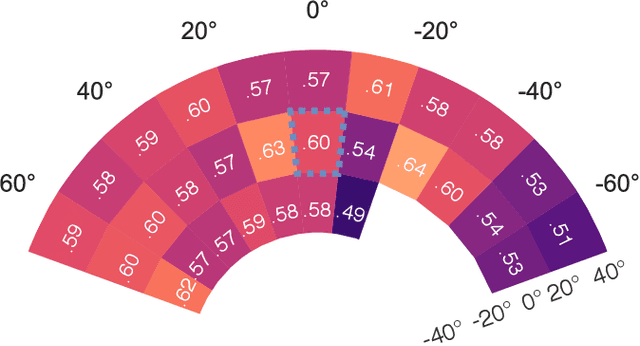
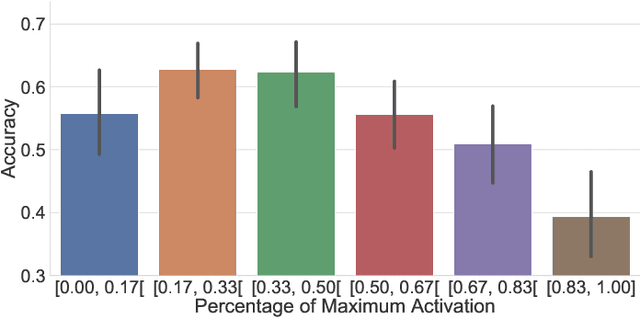
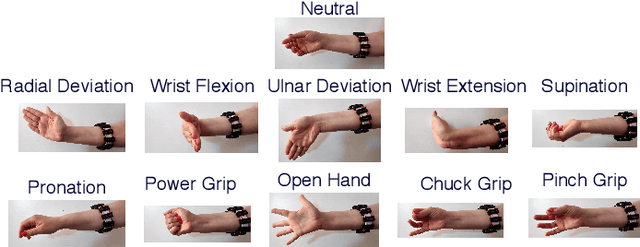
Within sEMG-based gesture recognition, a chasm exists in the literature between offline accuracy and real-time usability of a classifier. This gap mainly stems from the four main dynamic factors in sEMG-based gesture recognition: gesture intensity, limb position, electrode shift and transient changes in the signal. These factors are hard to include within an offline dataset as each of them exponentially augment the number of segments to be recorded. On the other hand, online datasets are biased towards the sEMG-based algorithms providing feedback to the participants, limiting the usability of such datasets as benchmarks. This paper proposes a virtual reality (VR) environment and a real-time experimental protocol from which the four main dynamic factors can more easily be studied. During the online experiment, the gesture recognition feedback is provided through the leap motion camera, enabling the proposed dataset to be re-used to compare future sEMG-based algorithms. 20 able-bodied persons took part in this study, completing three to four sessions over a period spanning between 14 and 21 days. Finally, TADANN, a new transfer learning-based algorithm, is proposed for long term gesture classification and significantly (p<0.05) outperforms fine-tuning a network.