 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge4D-CAAL: 4D Radar-Camera Calibration and Auto-Labeling for Autonomous Driving
Jan 29, 20264D radar has emerged as a critical sensor for autonomous driving, primarily due to its enhanced capabilities in elevation measurement and higher resolution compared to traditional 3D radar. Effective integration of 4D radar with cameras requires accurate extrinsic calibration, and the development of radar-based perception algorithms demands large-scale annotated datasets. However, existing calibration methods often employ separate targets optimized for either visual or radar modalities, complicating correspondence establishment. Furthermore, manually labeling sparse radar data is labor-intensive and unreliable. To address these challenges, we propose 4D-CAAL, a unified framework for 4D radar-camera calibration and auto-labeling. Our approach introduces a novel dual-purpose calibration target design, integrating a checkerboard pattern on the front surface for camera detection and a corner reflector at the center of the back surface for radar detection. We develop a robust correspondence matching algorithm that aligns the checkerboard center with the strongest radar reflection point, enabling accurate extrinsic calibration. Subsequently, we present an auto-labeling pipeline that leverages the calibrated sensor relationship to transfer annotations from camera-based segmentations to radar point clouds through geometric projection and multi-feature optimization. Extensive experiments demonstrate that our method achieves high calibration accuracy while significantly reducing manual annotation effort, thereby accelerating the development of robust multi-modal perception systems for autonomous driving.
XAgents: A Framework for Interpretable Rule-Based Multi-Agents Cooperation
Nov 21, 2024



Extracting implicit knowledge and logical reasoning abilities from large language models (LLMs) has consistently been a significant challenge. The advancement of multi-agent systems has further en-hanced the capabilities of LLMs. Inspired by the structure of multi-polar neurons (MNs), we propose the XAgents framework, an in-terpretable multi-agent cooperative framework based on the IF-THEN rule-based system. The IF-Parts of the rules are responsible for logical reasoning and domain membership calculation, while the THEN-Parts are comprised of domain expert agents that generate domain-specific contents. Following the calculation of the member-ship, XAgetns transmits the task to the disparate domain rules, which subsequently generate the various responses. These re-sponses are analogous to the answers provided by different experts to the same question. The final response is reached at by eliminat-ing the hallucinations and erroneous knowledge of the LLM through membership computation and semantic adversarial genera-tion of the various domain rules. The incorporation of rule-based interpretability serves to bolster user confidence in the XAgents framework. We evaluate the efficacy of XAgents through a com-parative analysis with the latest AutoAgents, in which XAgents demonstrated superior performance across three distinct datasets. We perform post-hoc interpretable studies with SHAP algorithm and case studies, proving the interpretability of XAgent in terms of input-output feature correlation and rule-based semantics.
Graph Fuzzy System: Concepts, Models and Algorithms
Oct 30, 2022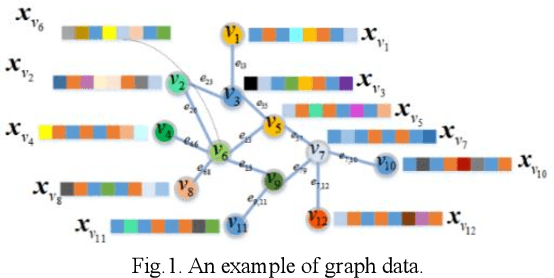
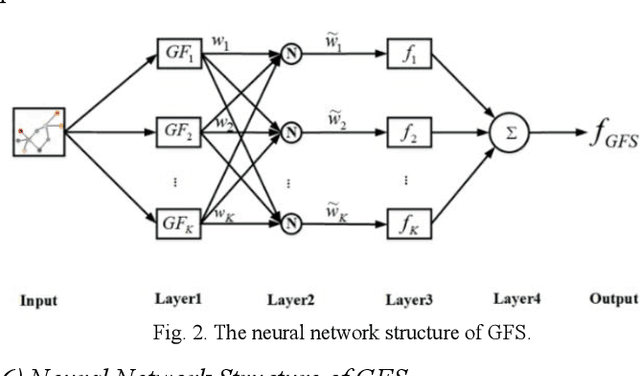
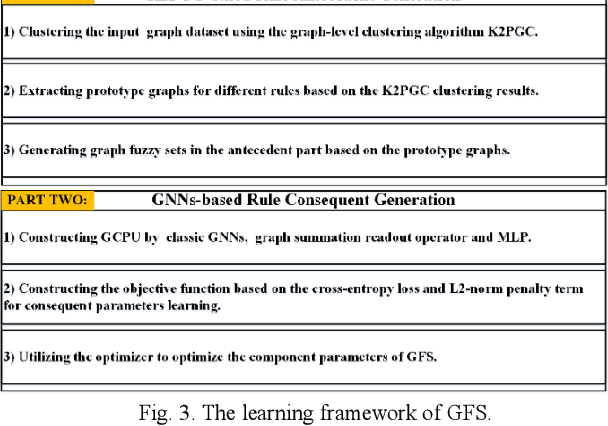
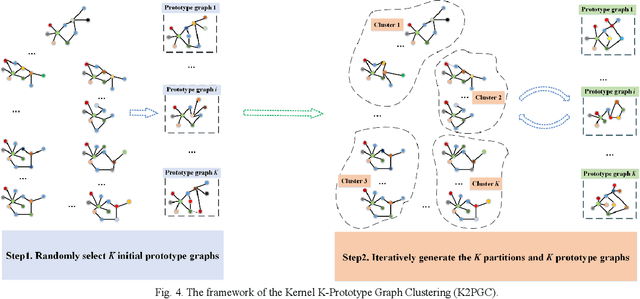
Fuzzy systems (FSs) have enjoyed wide applications in various fields, including pattern recognition, intelligent control, data mining and bioinformatics, which is attributed to the strong interpretation and learning ability. In traditional application scenarios, FSs are mainly applied to model Euclidean space data and cannot be used to handle graph data of non-Euclidean structure in nature, such as social networks and traffic route maps. Therefore, development of FS modeling method that is suitable for graph data and can retain the advantages of traditional FSs is an important research. To meet this challenge, a new type of FS for graph data modeling called Graph Fuzzy System (GFS) is proposed in this paper, where the concepts, modeling framework and construction algorithms are systematically developed. First, GFS related concepts, including graph fuzzy rule base, graph fuzzy sets and graph consequent processing unit (GCPU), are defined. A GFS modeling framework is then constructed and the antecedents and consequents of the GFS are presented and analyzed. Finally, a learning framework of GFS is proposed, in which a kernel K-prototype graph clustering (K2PGC) is proposed to develop the construction algorithm for the GFS antecedent generation, and then based on graph neural network (GNNs), consequent parameters learning algorithm is proposed for GFS. Specifically, three different versions of the GFS implementation algorithm are developed for comprehensive evaluations with experiments on various benchmark graph classification datasets. The results demonstrate that the proposed GFS inherits the advantages of both existing mainstream GNNs methods and conventional FSs methods while achieving better performance than the counterparts.