 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Single Camera Human 3D-Kinematics
Jan 13, 2023



Markerless estimation of 3D Kinematics has the great potential to clinically diagnose and monitor movement disorders without referrals to expensive motion capture labs; however, current approaches are limited by performing multiple de-coupled steps to estimate the kinematics of a person from videos. Most current techniques work in a multi-step approach by first detecting the pose of the body and then fitting a musculoskeletal model to the data for accurate kinematic estimation. Errors in training data of the pose detection algorithms, model scaling, as well the requirement of multiple cameras limit the use of these techniques in a clinical setting. Our goal is to pave the way toward fast, easily applicable and accurate 3D kinematic estimation \xdeleted{in a clinical setting}. To this end, we propose a novel approach for direct 3D human kinematic estimation D3KE from videos using deep neural networks. Our experiments demonstrate that the proposed end-to-end training is robust and outperforms 2D and 3D markerless motion capture based kinematic estimation pipelines in terms of joint angles error by a large margin (35\% from 5.44 to 3.54 degrees). We show that D3KE is superior to the multi-step approach and can run at video framerate speeds. This technology shows the potential for clinical analysis from mobile devices in the future.
* Published in the MDPI Sensors special Issue "Sensors and Musculoskeletal Dynamics to Evaluate Human Movement" on December 28, 2022
Self-Adapting Variable Impedance Actuator Control for Precision and Dynamic Tasks
Sep 22, 2020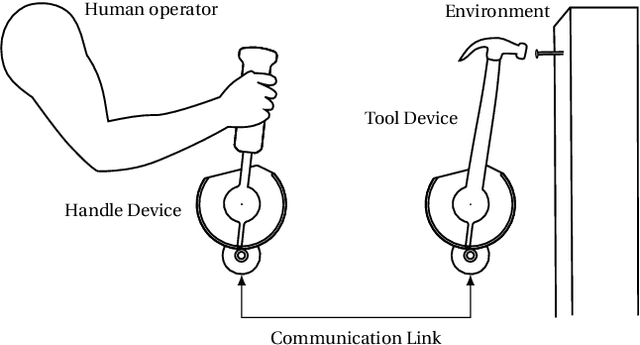
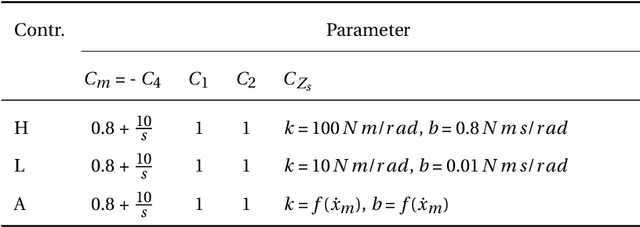
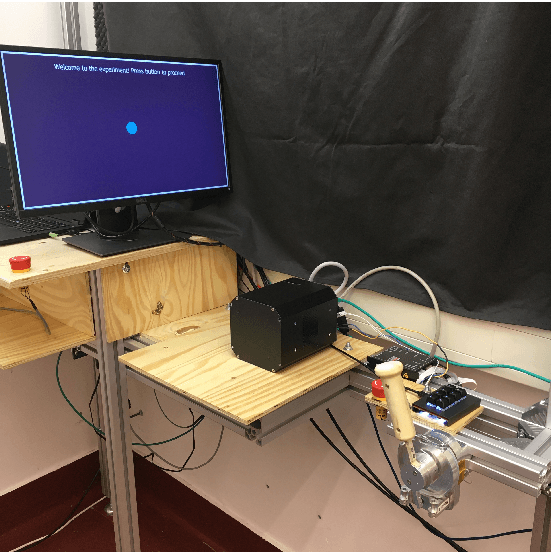
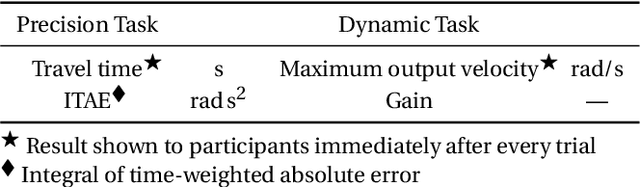
Variable impedance actuators (VIAs) as tool devices for teleoperation could extend the range of tasks that humans can perform through a teleoperated robot by mimicking the change of upper limb stiffness that humans perform for different tasks, increasing the dynamic range of the robot. This requires appropriate impedance control. Goal of this study is to show the effectiveness of a controller that does not require additional sensors, reducing system complexity and increasing ease of use. The controller should allow to perform precise positioning tasks and dynamic tasks like hammering through teleoperation with a VIA tool device automatically adapting the impedance setting of the VIA. This is achieved by a control law according to the principle "slow-stiff/fast-soft". The controller was tested in a human user study with 24 participants comparing the human-machine performance with the self-adapting controller in a bilateral telemanipulation experiment with two tasks (precision/dynamic) using three impedance settings (high/low/adaptive impedance). The results indicate that the proposed system performs equally well as state of the art stiff teleoperation devices for precision tasks, while having benefits in terms of increased safety and reduced wear for dynamic tasks. This is a step towards teleoperation with a wide dynamic range.