 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Adapting Variable Impedance Actuator Control for Precision and Dynamic Tasks
Sep 22, 2020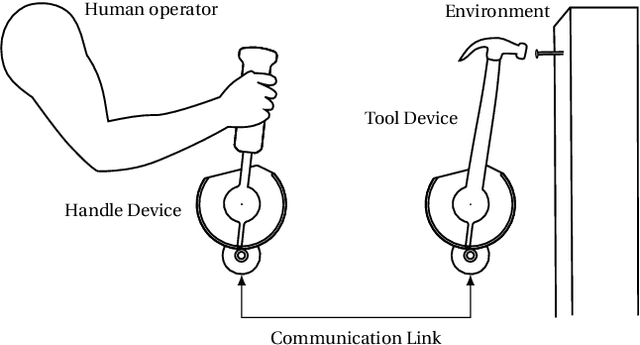
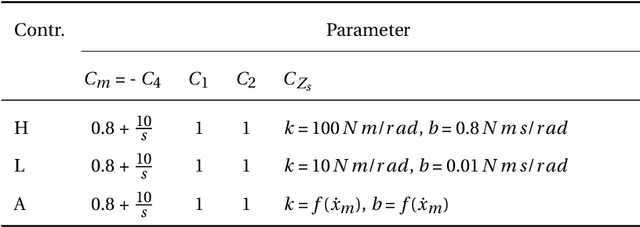
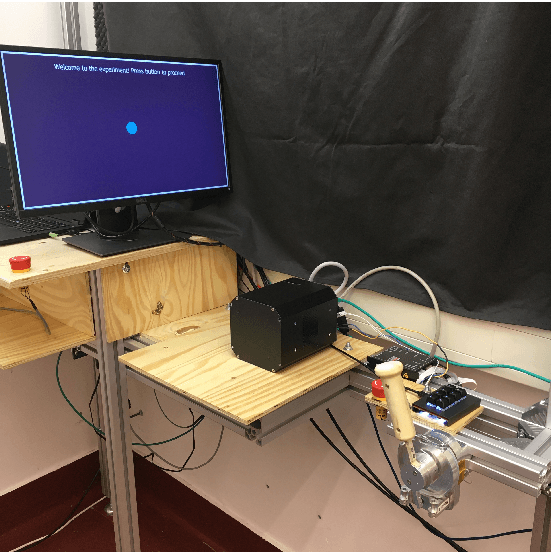
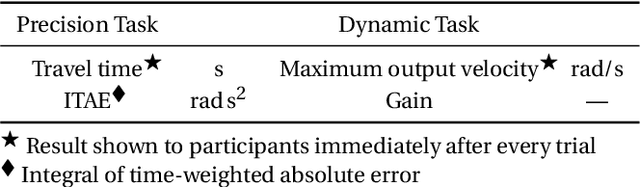
Variable impedance actuators (VIAs) as tool devices for teleoperation could extend the range of tasks that humans can perform through a teleoperated robot by mimicking the change of upper limb stiffness that humans perform for different tasks, increasing the dynamic range of the robot. This requires appropriate impedance control. Goal of this study is to show the effectiveness of a controller that does not require additional sensors, reducing system complexity and increasing ease of use. The controller should allow to perform precise positioning tasks and dynamic tasks like hammering through teleoperation with a VIA tool device automatically adapting the impedance setting of the VIA. This is achieved by a control law according to the principle "slow-stiff/fast-soft". The controller was tested in a human user study with 24 participants comparing the human-machine performance with the self-adapting controller in a bilateral telemanipulation experiment with two tasks (precision/dynamic) using three impedance settings (high/low/adaptive impedance). The results indicate that the proposed system performs equally well as state of the art stiff teleoperation devices for precision tasks, while having benefits in terms of increased safety and reduced wear for dynamic tasks. This is a step towards teleoperation with a wide dynamic range.
Design and Characterization of the Dynamic Robotic Actuator Dyrac
Jun 18, 2019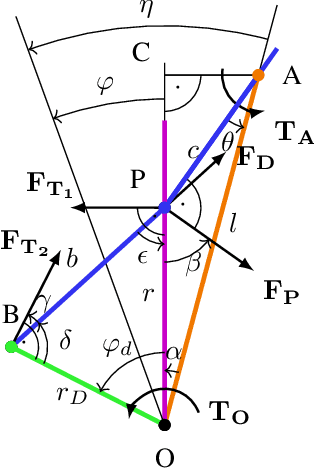
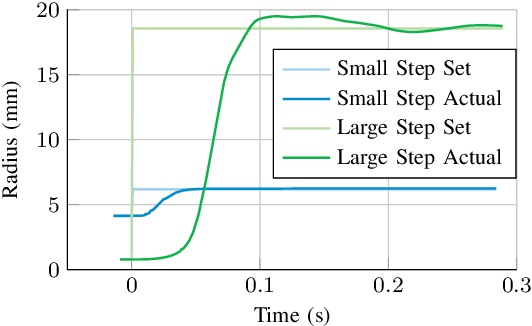
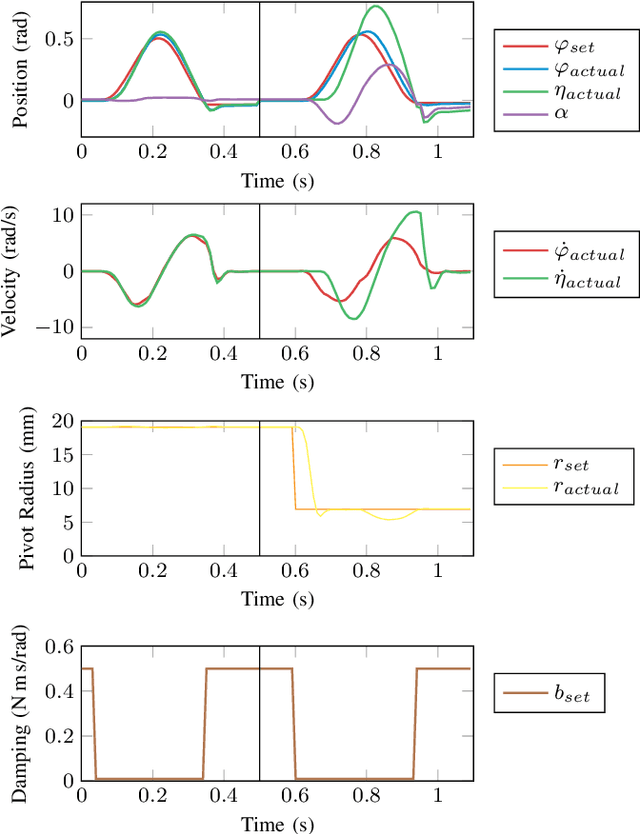
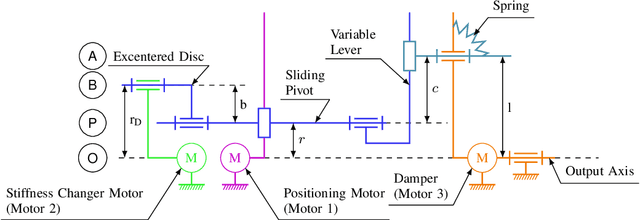
A new variable stiffness actuator (VSA) is presented, designed for reproducing the full versatility of human motions from delicate tasks to precise positioning tasks through teleoperation, and highly dynamic tasks like hammering in particular. Existing VSAs show good performance in terms of either quick stiffness changing time, high output velocity, or variable damping, but not in the combination required for highly dynamic tasks. Goal of the presented design is to reach with one system a stiffness changing time of 50 ms, a peak output velocity of 20 rad/s and variable damping, based on the requirements of literature and our previous research. A prototype was built and its performance measured with three motors in parallel configuration: two responsible for changing the VSAs neutral position and effective stiffness through a lever arm mechanism, and the third acting as variable damper. Its effective stiffness can be changed continuously within 50 ms to 120 ms for small to large stiffness steps, its output velocity is up to 1100 rad/s and its oscillation behavior can be controlled precisely with the variable damper. Its effective stiffness range is 0.2 Nm/rad to 313 Nm/rad and its maximum continuous torque 9.4 Nm. This unique combination makes the new actuator particularly suitable for highly dynamic tasks, while being also very versatile, and makes it especially interesting for teleoperation and human-robot collaboration.
Increasing Impact by Mechanical Resonance for Teleoperated Hammering
Nov 16, 2018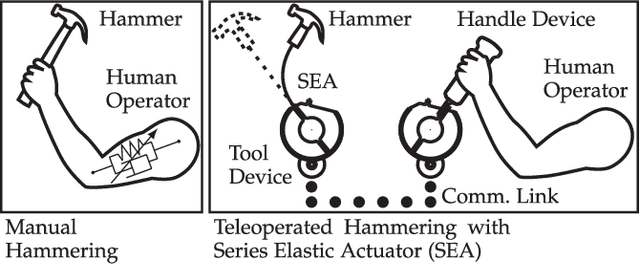
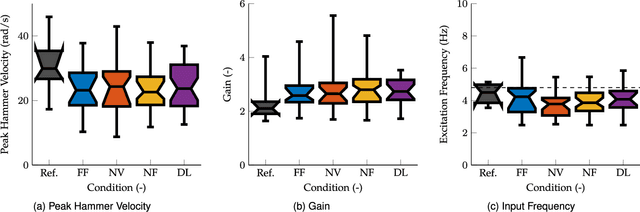
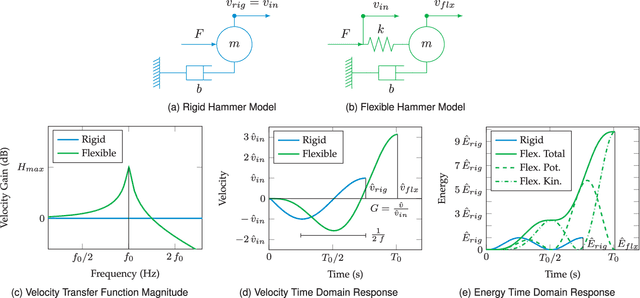
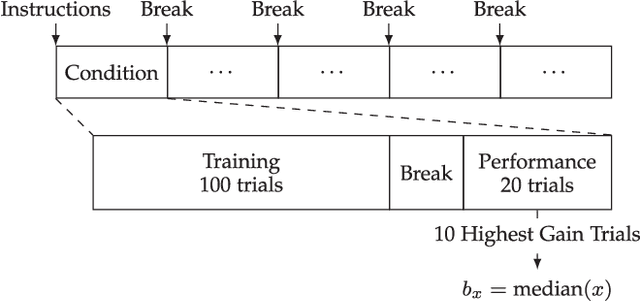
Series elastic actuators (SEAs) are interesting for usage in harsh environments as they are more robust than rigid actuators. This paper shows how SEAs can be used in teleoperation to increase output velocity in dynamic tasks. A first experiment is presented that tested human ability to achieve higher hammerhead velocities with a flexible hammer than with a rigid hammer, and to evaluate the influence of the resonance frequency. In this experiment, 13 participants executed a hammering task in direct manipulation using flexible hammers in four conditions with resonance frequencies of 3.0 Hz to 9.9 Hz and one condition with a rigid hammer. Then, a second experiment is presented that tested the ability of 32 participants to reproduce the findings of the first experiment in teleoperated manipulation with different feedback conditions: with visual and force feedback, without visual feedback, without force feedback, and with a communication delay of 40 ms. The results indicate that humans can exploit the mechanical resonance of a flexible system to at least double the output velocity without combined force and vision feedback. This is an unexpected result, allowing the design of simpler and more robust teleoperators for dynamic tasks.
Towards Teleoperation with Human-like Dynamics: Human Use of Elastic Tools
Mar 29, 2017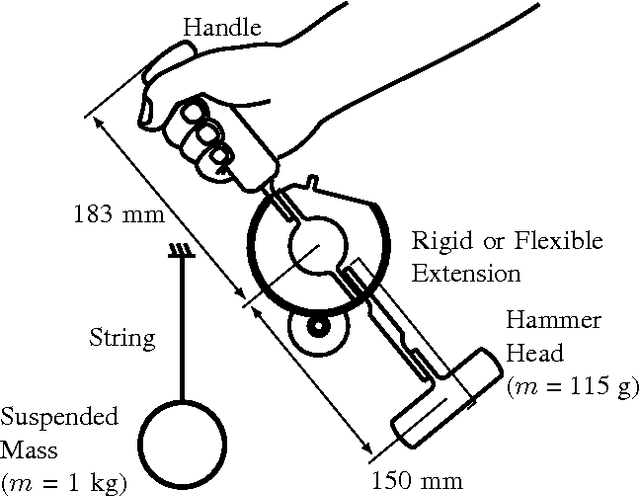
Variable stiffness actuators undergo lower peak force in contacts compared to their rigid counterparts, and are thus safer for human-robot interaction. Furthermore, they can store energy in their elastic element and can release it later to achieve human-like dynamic movements. However, it is not clear how to integrate them in teleoperator systems so that they can be controlled intuitively by a human. We performed an experiment to study human use of elastic tools to determine how a teleoperator system with an elastic slave would need to be designed. For this, we had 13 untrained participants hammer with an elastic tool under different stiffness conditions, asking them to try to find the best timing for a backward-forward swing motion in order to achieve the strongest impact. We found that the participants generally executed the task efficiently after a few trials and they converged to very similar solutions. The stiffness influenced the performance slightly, a stiffness between 2.3 Nm/rad and 4.1 Nm/rad showing the best results. We conclude that humans intuitively know how to efficiently use elastic tools for hammering type tasks. This could facilitate the control of teleoperator systems with elastic slave manipulators for tasks requiring explosive movements like hammering.
* 6 pages, 13 figures, accepted to the World Haptics Conference 2017
Pushing the limits of the CyberGrasp for haptic rendering
May 17, 2016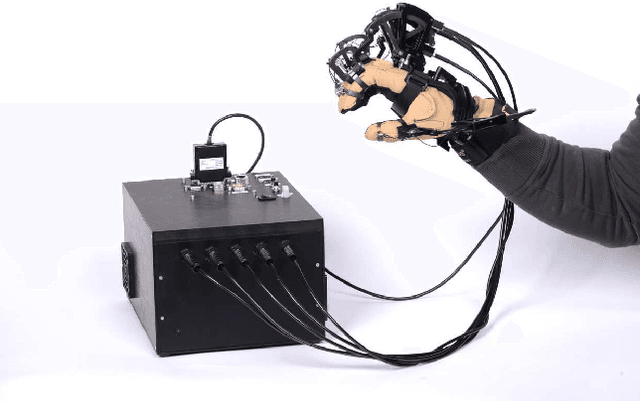
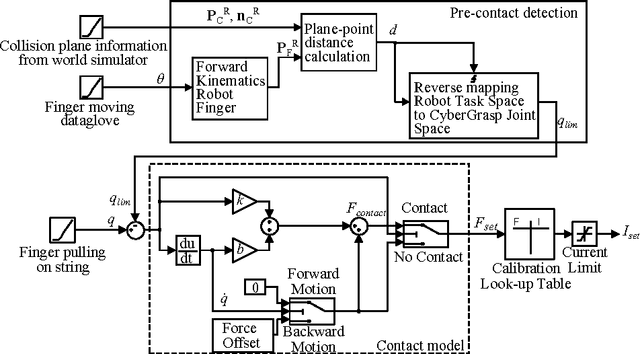
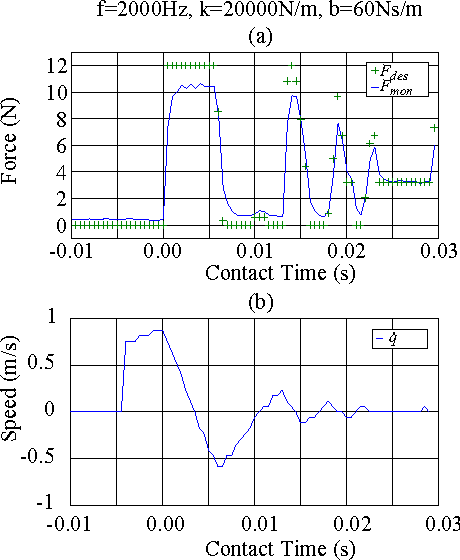
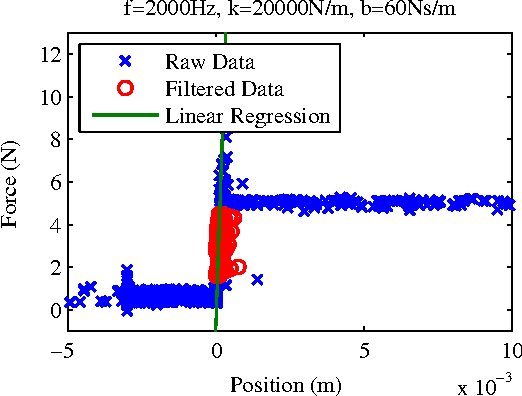
The CyberGrasp is a well known dataglove-exoskeleton device combination that allows to render haptic feedback to the human fingers. Its design, however, restricts its usability for teleoperation through a limited control bandwidth and position sensor resolution. Therefore the system is restricted to low achievable contact stiffness and feedback gain magnitudes in haptic rendering. Moreover, the system prohibits simple adaption of its controller implementation. In this paper, the ExHand Box is presented, a newly designed back-end to widen the CyberGrasp's bandwidth restrictions and to open it up for fully customized controller implementations. The ExHand Box provides a new computer, interface electronics and motor controllers for the otherwise unmodified CyberGlove and CyberGrasp hand systems. The loop frequency of the new system can be freely varied up to 2 kHz and custom controllers can be implemented through an automatic code generation interface. System performance identification experiments are presented that demonstrate improved behavior in hard contact situations over a range of sampling periods. Maximum contact stiffnesses of up to 50kN/m in a stable condition are demonstrated, which is significantly higher than what could be achieved with the non-customized original system version. Moreover, a bilateral control experiment is conducted to demonstrate the new system's usability for generic teleoperation research. In this experiment a raycasting algorithm is introduced for pre-contact detection in order to compensate for high delay and jitter communication links between master and slave as they appear in an Ethernet network. It is demonstrated that the contact stiffness can be maintained in the order of magnitude of the system performance identification with a demonstrated stiffness of 41kN/m in a stable condition.
* 7 pages, 12 figures