 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePushing the limits of the CyberGrasp for haptic rendering
Paper and Code
May 17, 2016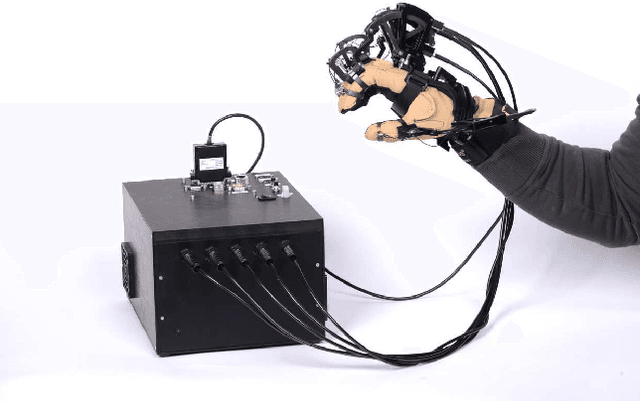
The CyberGrasp is a well known dataglove-exoskeleton device combination that allows to render haptic feedback to the human fingers. Its design, however, restricts its usability for teleoperation through a limited control bandwidth and position sensor resolution. Therefore the system is restricted to low achievable contact stiffness and feedback gain magnitudes in haptic rendering. Moreover, the system prohibits simple adaption of its controller implementation. In this paper, the ExHand Box is presented, a newly designed back-end to widen the CyberGrasp's bandwidth restrictions and to open it up for fully customized controller implementations. The ExHand Box provides a new computer, interface electronics and motor controllers for the otherwise unmodified CyberGlove and CyberGrasp hand systems. The loop frequency of the new system can be freely varied up to 2 kHz and custom controllers can be implemented through an automatic code generation interface. System performance identification experiments are presented that demonstrate improved behavior in hard contact situations over a range of sampling periods. Maximum contact stiffnesses of up to 50kN/m in a stable condition are demonstrated, which is significantly higher than what could be achieved with the non-customized original system version. Moreover, a bilateral control experiment is conducted to demonstrate the new system's usability for generic teleoperation research. In this experiment a raycasting algorithm is introduced for pre-contact detection in order to compensate for high delay and jitter communication links between master and slave as they appear in an Ethernet network. It is demonstrated that the contact stiffness can be maintained in the order of magnitude of the system performance identification with a demonstrated stiffness of 41kN/m in a stable condition.