 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Characterization of the Dynamic Robotic Actuator Dyrac
Paper and Code
Jun 18, 2019
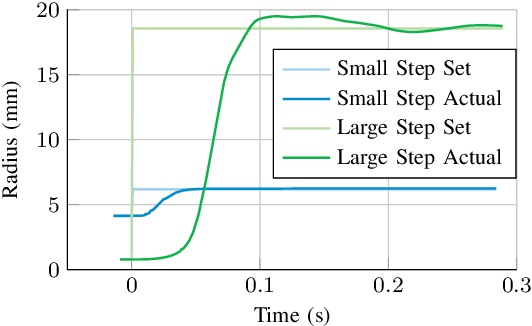
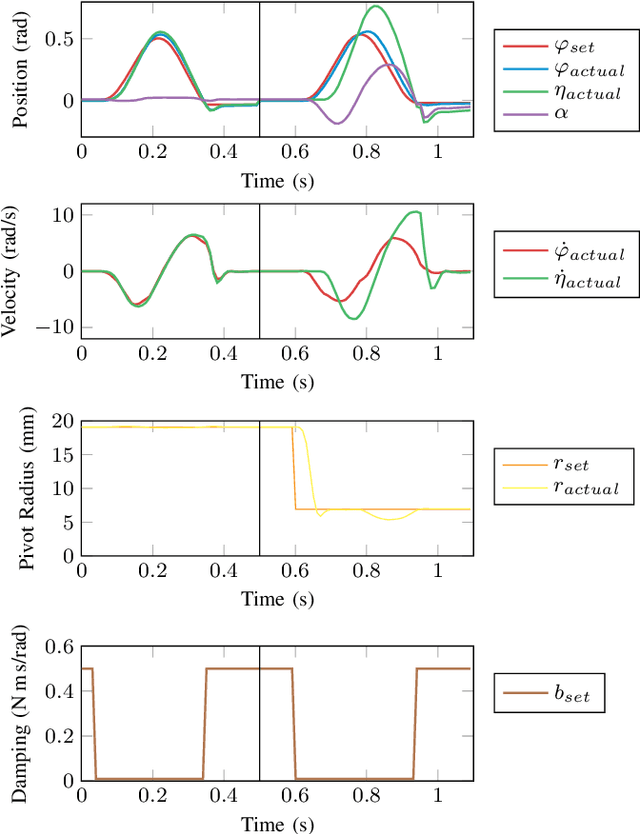
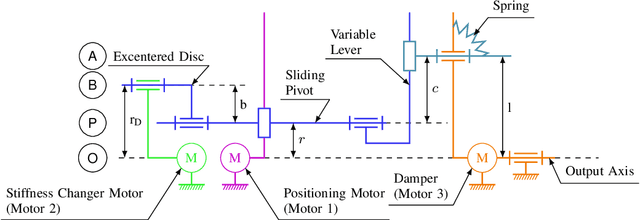
A new variable stiffness actuator (VSA) is presented, designed for reproducing the full versatility of human motions from delicate tasks to precise positioning tasks through teleoperation, and highly dynamic tasks like hammering in particular. Existing VSAs show good performance in terms of either quick stiffness changing time, high output velocity, or variable damping, but not in the combination required for highly dynamic tasks. Goal of the presented design is to reach with one system a stiffness changing time of 50 ms, a peak output velocity of 20 rad/s and variable damping, based on the requirements of literature and our previous research. A prototype was built and its performance measured with three motors in parallel configuration: two responsible for changing the VSAs neutral position and effective stiffness through a lever arm mechanism, and the third acting as variable damper. Its effective stiffness can be changed continuously within 50 ms to 120 ms for small to large stiffness steps, its output velocity is up to 1100 rad/s and its oscillation behavior can be controlled precisely with the variable damper. Its effective stiffness range is 0.2 Nm/rad to 313 Nm/rad and its maximum continuous torque 9.4 Nm. This unique combination makes the new actuator particularly suitable for highly dynamic tasks, while being also very versatile, and makes it especially interesting for teleoperation and human-robot collaboration.